




Every other week, MAKE’s awesome interns tell about the projects they’re building in the Make: Labs, the trouble they’ve gotten into, and what they’ll make next.
By Eric Chu, engineering intern
Let’s admit it. We’ve all had thoughts of building our own robot of mass destruction. Well, I was able to do just that for my college class Engineering 102: Robotics Design Challenge … sort of.
Last spring my class used the Lego NXT robotics platform to solve two engineering challenges. The first was to build a robot that can cross a pit filled with ping-pong balls, racquetballs, and mini whiffle balls. The second was to build a robot that navigates through a maze, distinguishes between orange and blue balloons, and pops all the orange balloons. Both challenges had a time limit of 2 minutes.
Meet Poke-e, my team’s balloon-popping, maze-navigating robot:
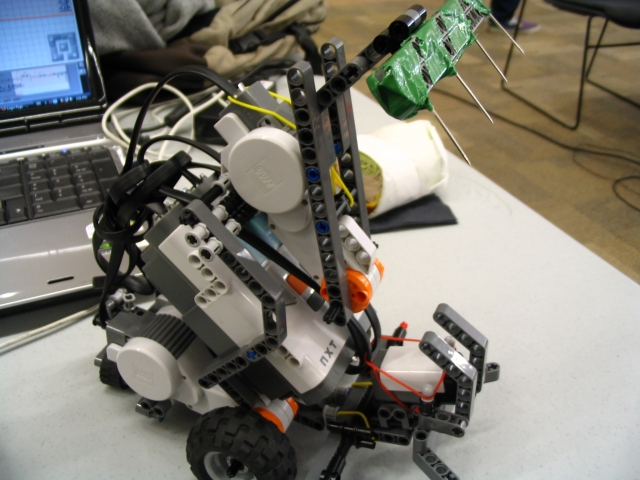
Poke-e is made completely out of Lego Mindstorms NXT parts, except for the straight pins that are attached with green duct tape (generously donated by my friend, Dan). I felt horrible putting the non-Lego parts on, but at least it looked pretty killer afterward!
Poke-e guarding my laptop and turkey wrap:

I used the original Lego driving base in Poke-e for its simplicity and sturdiness. Attached to the base is a HiTechnic color sensor, which I mounted on a swivel so that it can turn to the balloon even when the robot runs alongside the balloon. To navigate around the maze, I used the built-in rotation sensors of the Lego motors to monitor the wheel’s rotational speed. When the robot runs into a wall, the wheels are unable to turn freely, and thus trigger the robot to back up and turn. This acts like a full-body touch sensor!
Color sensor with LED lit up:

Check out the video of us trying to get Poke-e to pop the balloon …

… and of Dan’s team’s robot in the maze:


How do you think you would solve these challenges?
4 thoughts on “Intern’s Corner: My robot of mass destruction”
Comments are closed.
ADVERTISEMENT
Join Make: Community Today






Hello, every one! my name is Artt Ri from ITRI Taiwan, an elite group of electronic researcher/hackers building cool tech gadgets – including a thin-paper speaker which makes real music.
We are adjacent to the world’s largest gadget labs/factories in Taiwan. We are developing cool technology to enable us enjoy better life in the 21st century. We are hardware hackers.
The fleXpeaker is the name of the thin-paper spaker. The thickness of the “speaker†is merely 0.1 centimeters. Therefore, the paper can be integrated into buildings, electric vehicles, entertainment and medical application. Cool eh?
We have cool gadget released from time to time. We are releasing another ground-breaking product soon in 3 weeks. Welcome to join our Facebook group to receive the latest news.
Artt Ri
Congrats on making an awesome robot.
If anyone else out there is looking for a good color sensor, I highly suggest Kopplin Controls. http://www.kopplincontrols.com/index.html