


In early 2011 my robot club, the Dallas Personal Robotics Group, was looking for a way to help our beginning members build up their skills. To this end, we produced a series of lessons covering 5 topics needed to make a simple, programmable robot: making PCBs with the toner transfer method, programming ATtiny microprocessors, laying out circuit boards using KiCAD, using Inkscape to design robot parts, and programming state machines. Videos of these lectures are available on DPRG’s website.
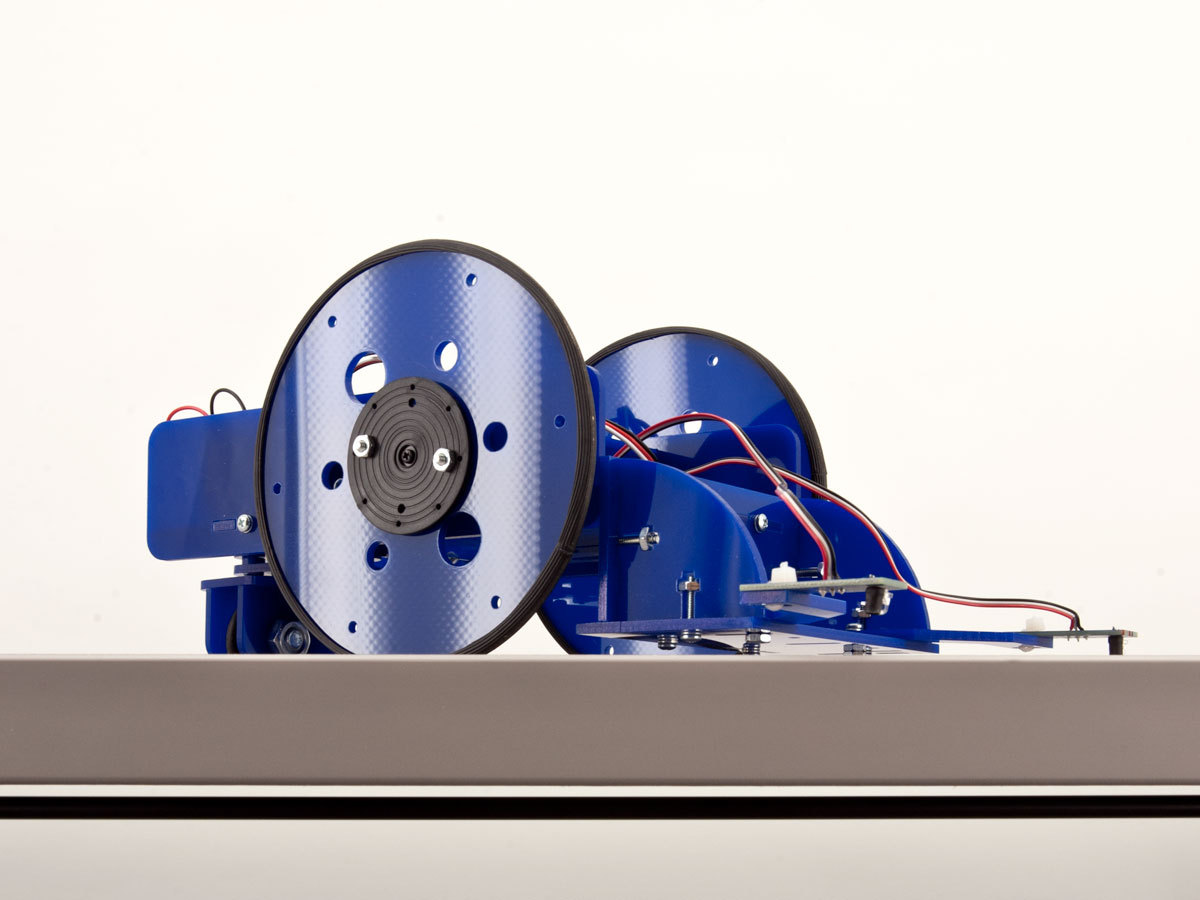
The Tiny Wanderer is the starter DIY robot model we designed to support the series. It uses the unintimidating ATtiny85 chip, which is less complex than larger chips, and the new kit version shown here lets you easily swap in an Arduino.
The chassis, inspired by the now-discontinued Oomlout SERB, has benefited from constant modification and tweaks by DPRG members. Its two IR LED/sensor proximity “feelers” were originally designed to let the bot wander around a tabletop without falling off, but they can be repurposed for obstacle avoidance and line-following. (Another successful mod added 64-slot encoders on the wheels, for dead reckoning.)
SVG and PDF cutout templates
- Download the templates zip file.
Download the Code
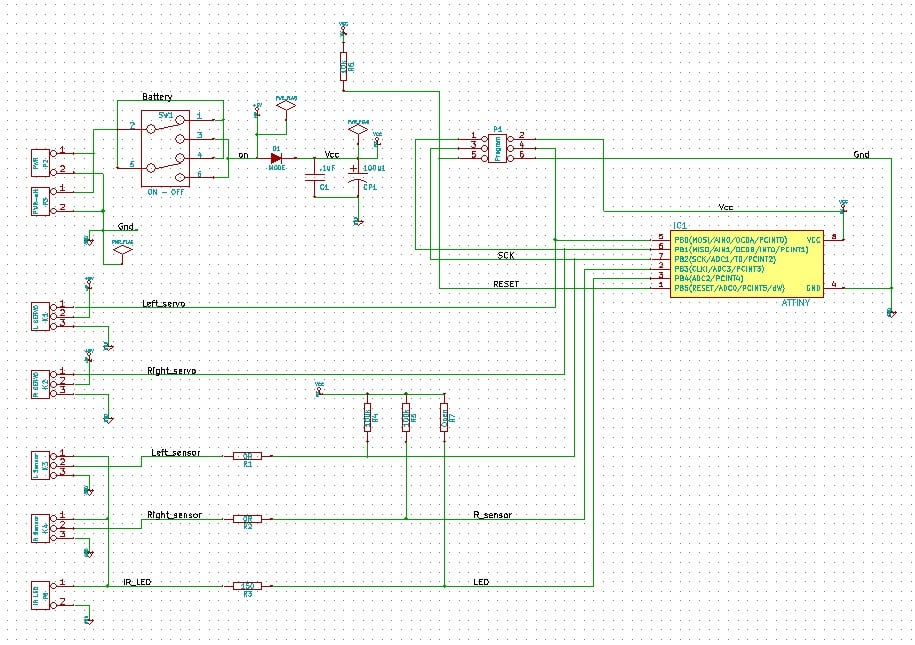
Circuit Board Layout files
{kind=link}
Wiring Check Tables
Before inserting the ATTiny85 into the socket on the controller board you should make some simple ohm meter checks using these tables.
Here are some additional mods that give Tiny completely different personalities:
- Navigate around via bump sensor in front: Bump Sensor for the Tiny Wanderer
- Light-seeking "Moth" (or light-avoiding): Tiny Wanderer "Moth"
I hope the fun we’ve had with Tiny Wanderer will be shared with other hobby roboticists and makers around the world.