Supplemental adapting is the goal for this project.
If you have ever taken a new adaptor board and tried to use it without thinking through its integration into a project you will know well that it is often only a first step.
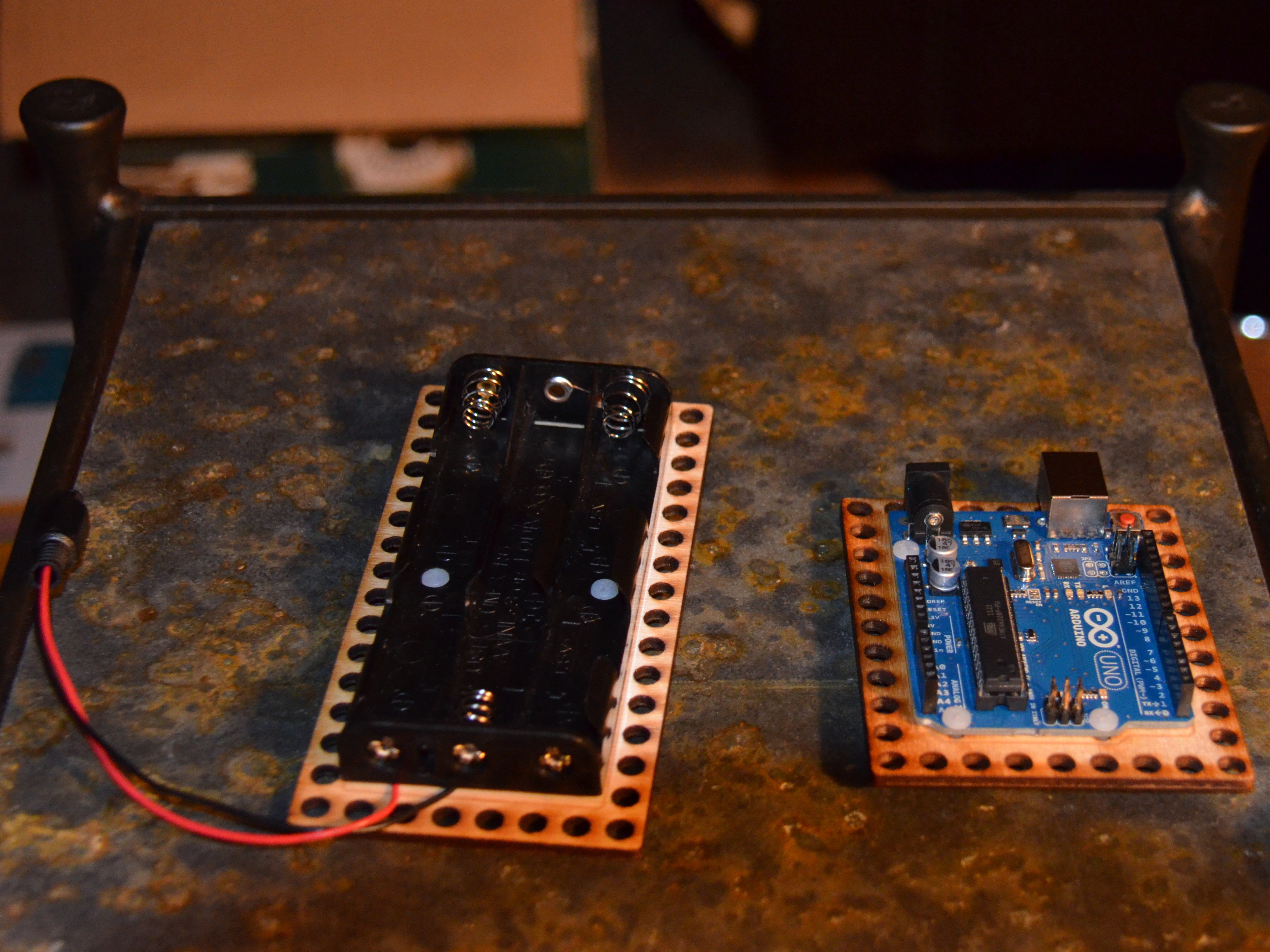
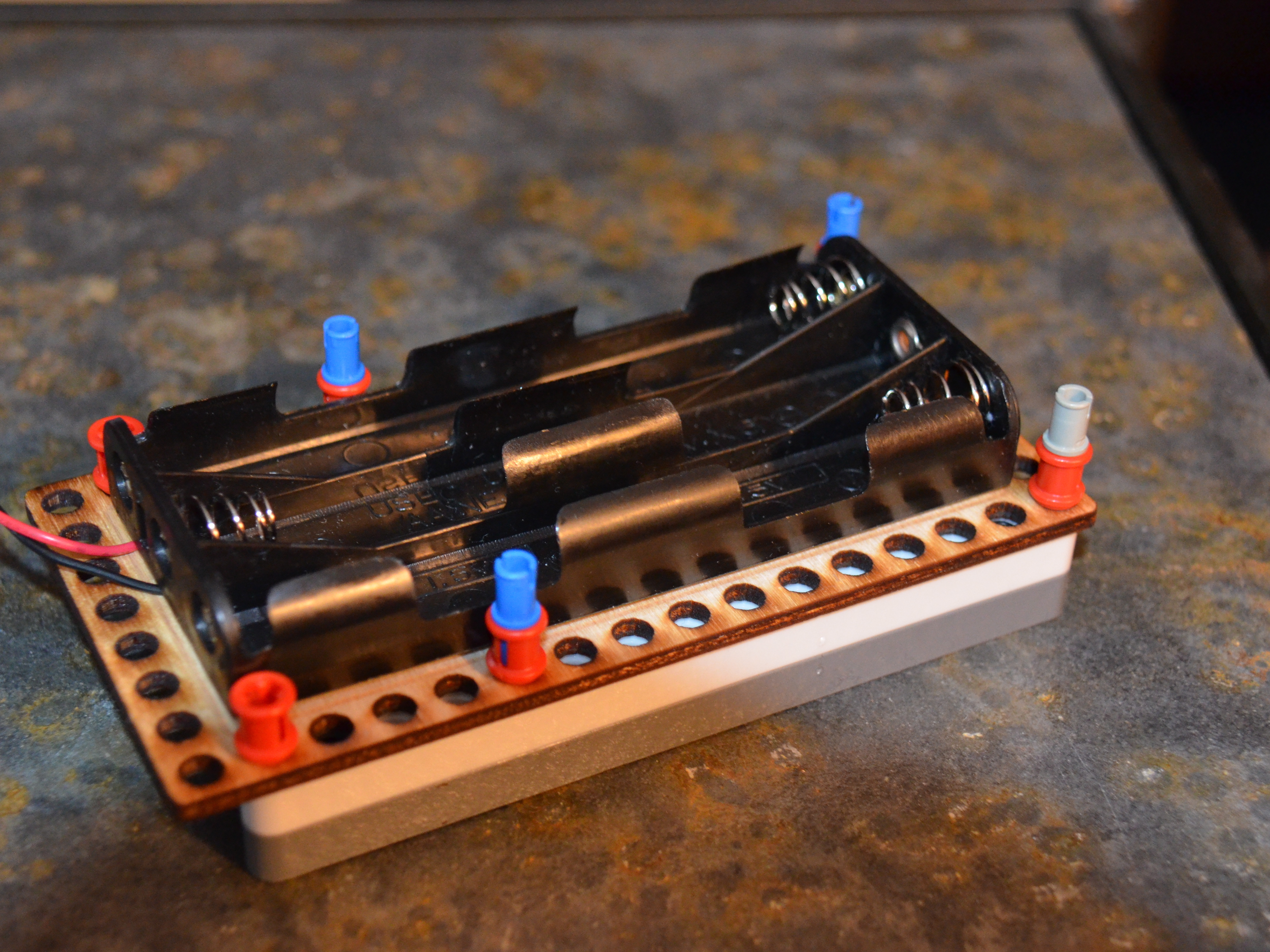
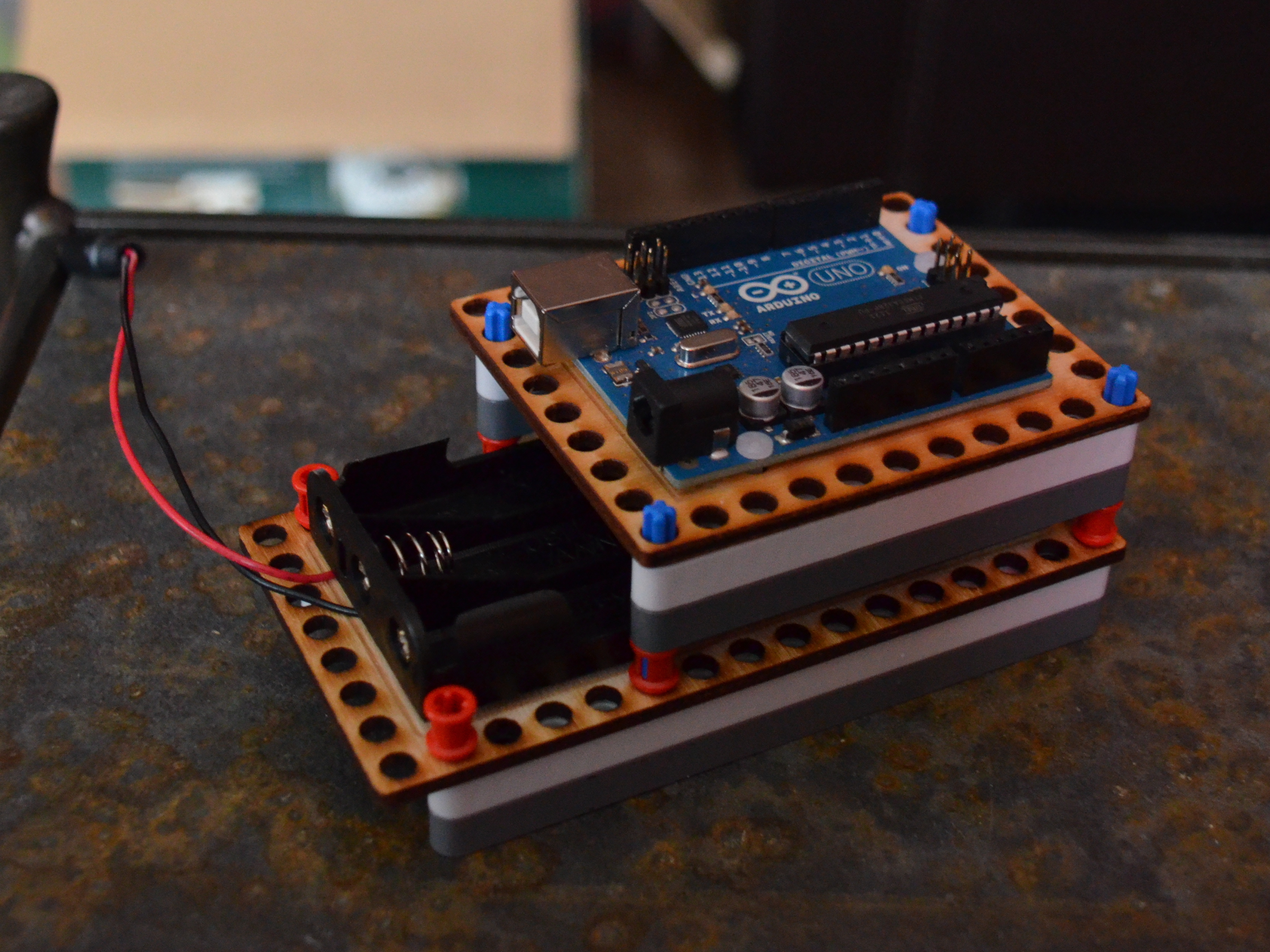
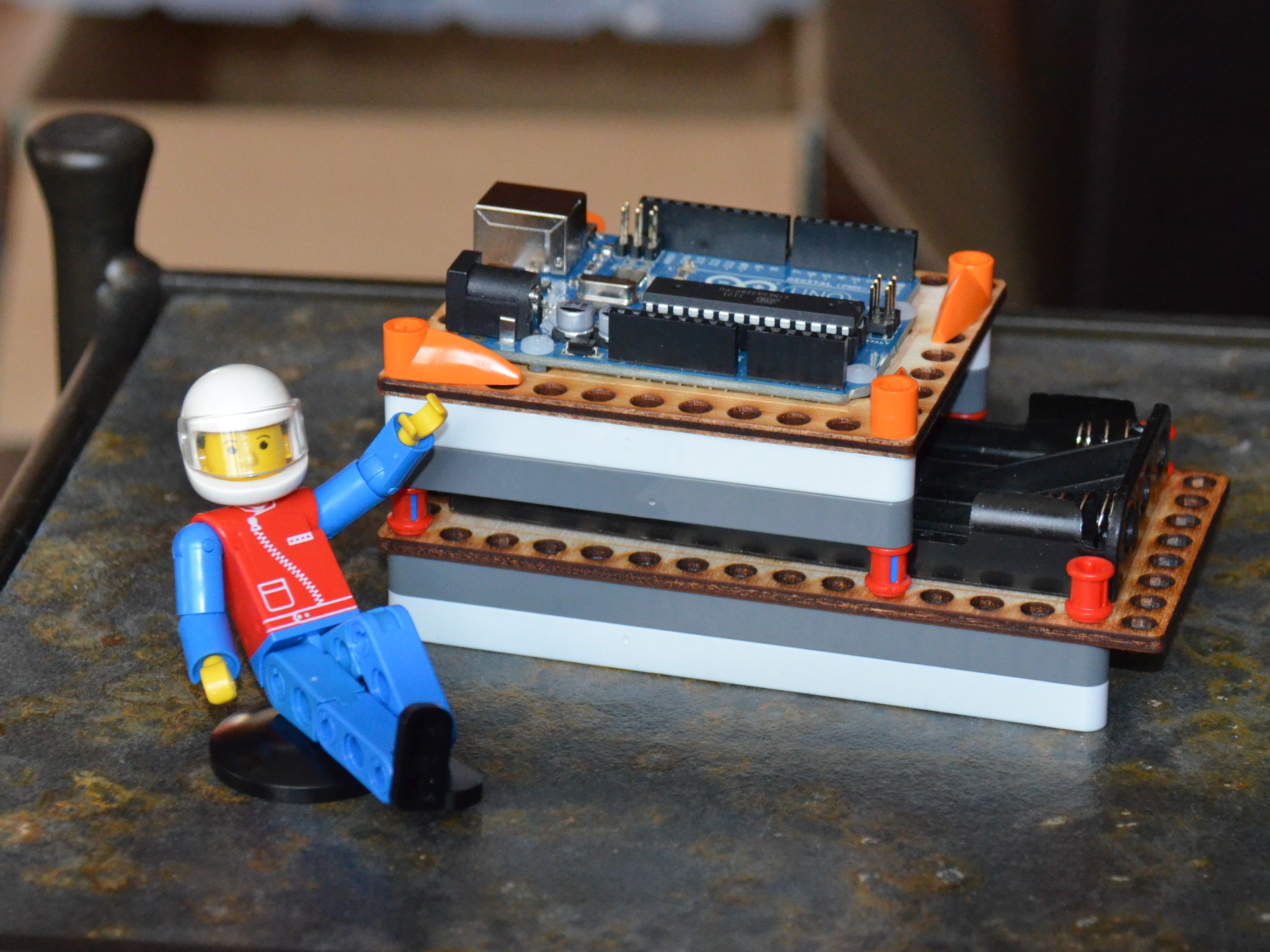
The guide that follows is a method for taking an extant adaptor board and taking step two; i.e., adapting the board to the design principles and function making it clean and functional.
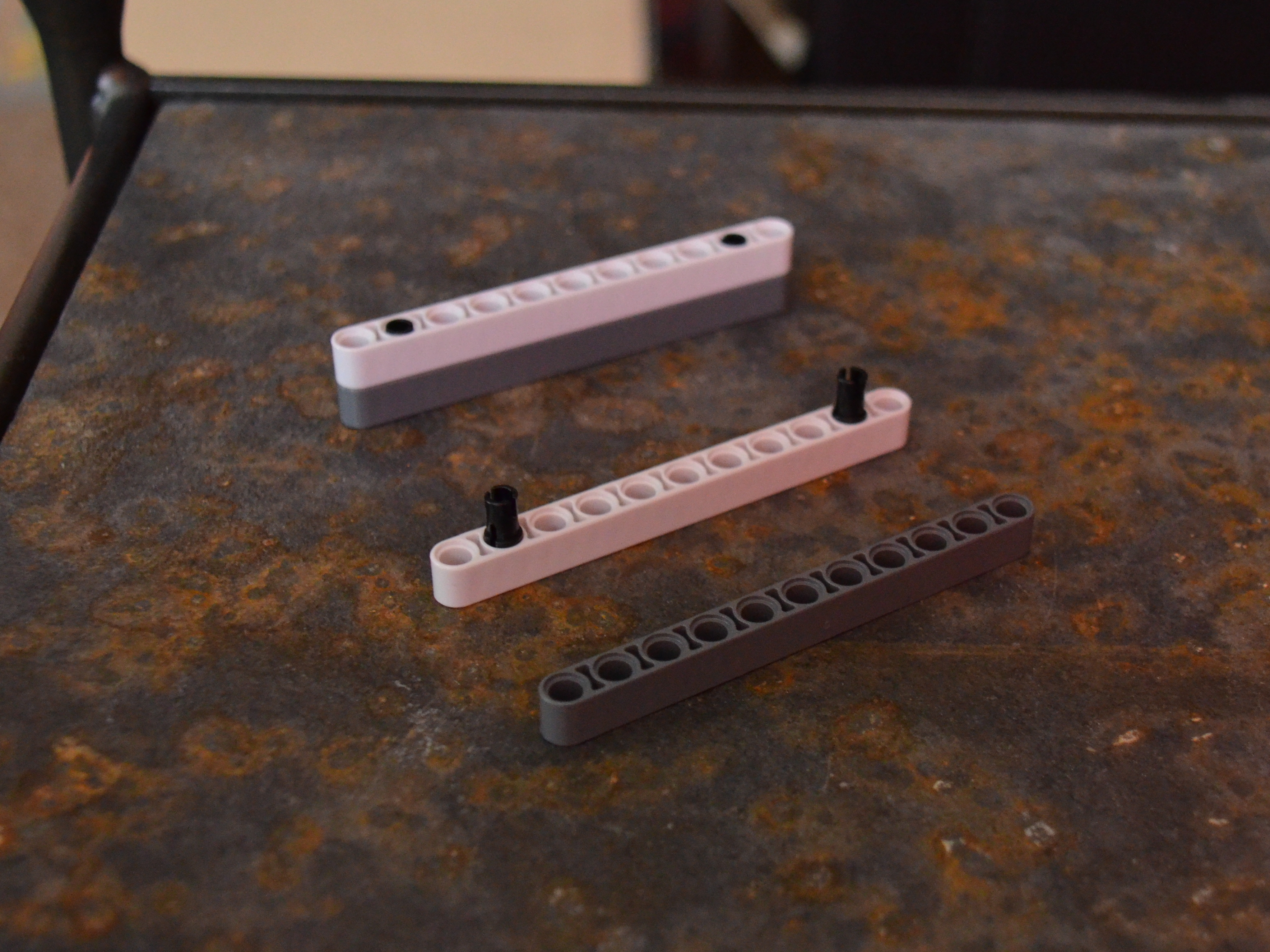
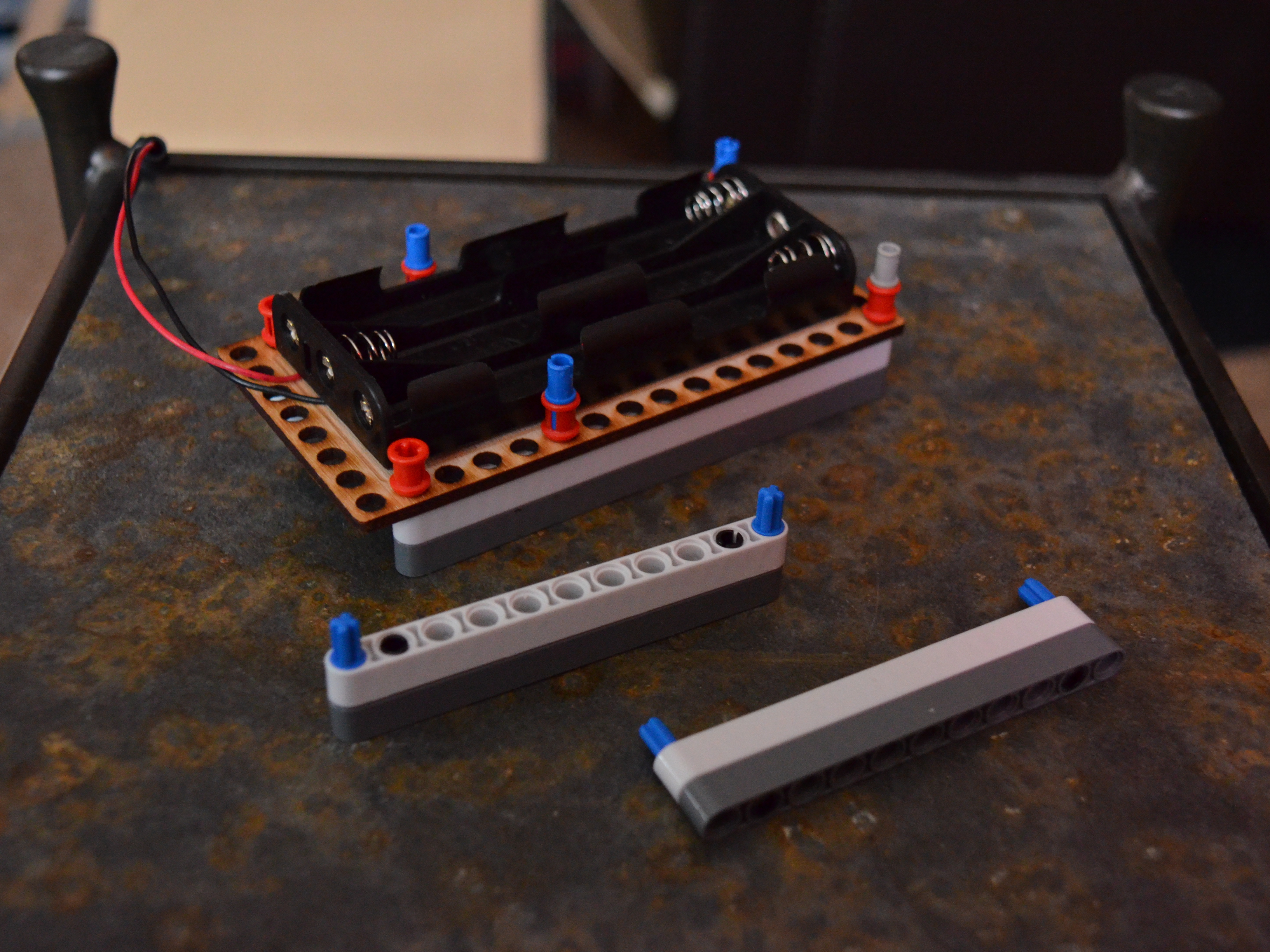
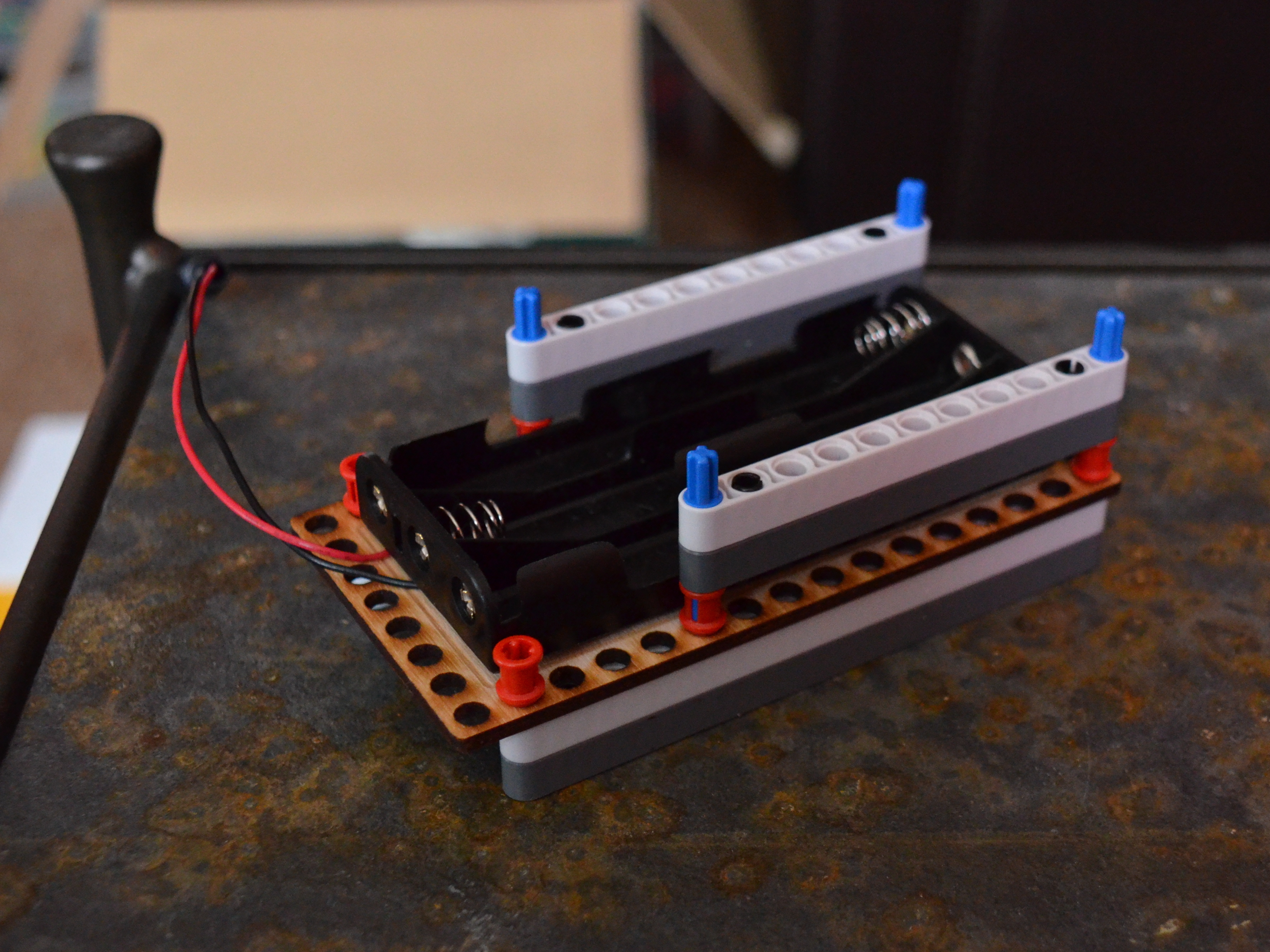
Though this design is specific to the boards that I link to in the parts section of the guide you can still glean some basic ideas from the guide such as offsetting to allow for space, pin placement techniques, and simplicity in design — these are universal to a good construction.