


I love to modify hobby servos into continuous rotation gearmotors. Not only are the very useful, but I feel like I’m getting away with something sneaky. A modified servo in a radio controlled vehicle does the job of a motor, a gearset, and an electronic speed controller, and when cheap servos can be had for just a few dollars that’s a real bargain.
I always use cheap servos, but in my experience they are a hassle to modify. The potentiometer is often part of the structure, so it can’t be removed, but rather the wires to it have to be cut and matching resistors soldered in to replace its variable resistor. If you want it to have a fine adjustment trimpot you have to buy one and solder that in too.
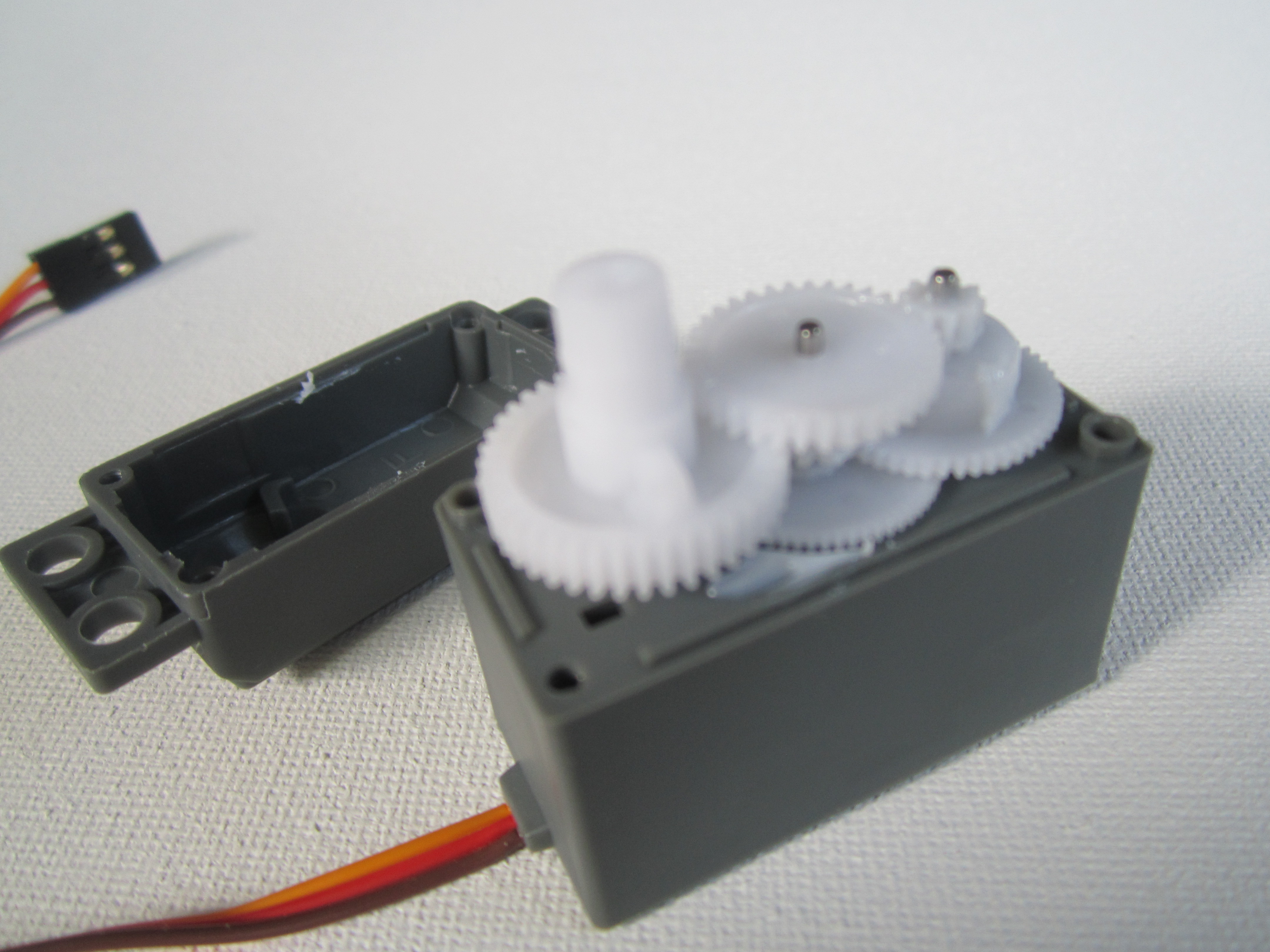
Recently I bought some $3.50 HobbyKing 15138 servos to see how easy they would be to modify. It turns out that they are incredibly easy. Aside from turning some screws the modification consists only of removing a stop nub and drilling a hole. Here’s how to do it.
Here’s the servo you’re looking for:
