Gather the parts and follow the basic instructions and you can have a robot capable of following moving objects! With basic coding experience, you can also change the distance at which the robot senses moving objects or the speed the robot moves.
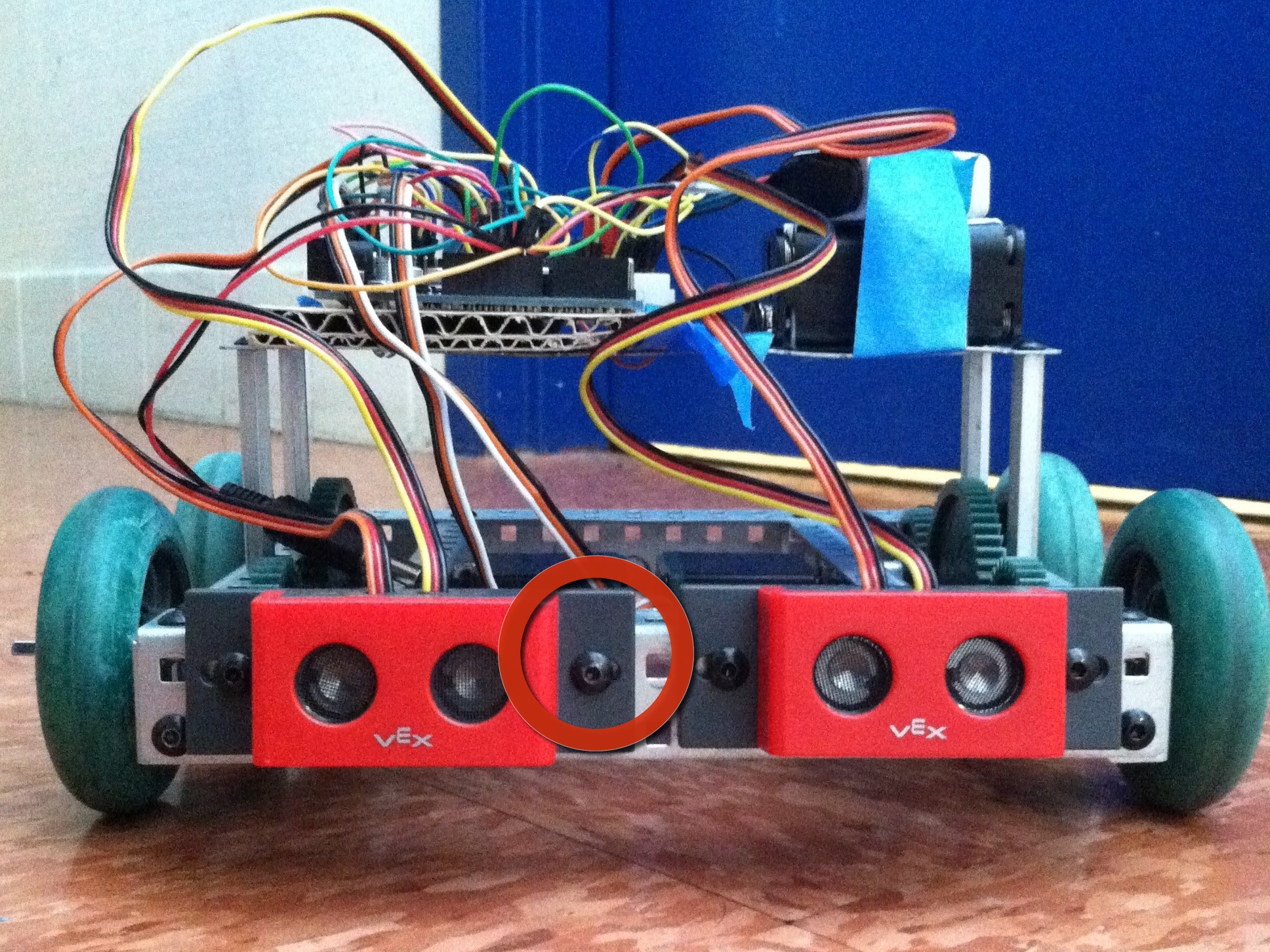
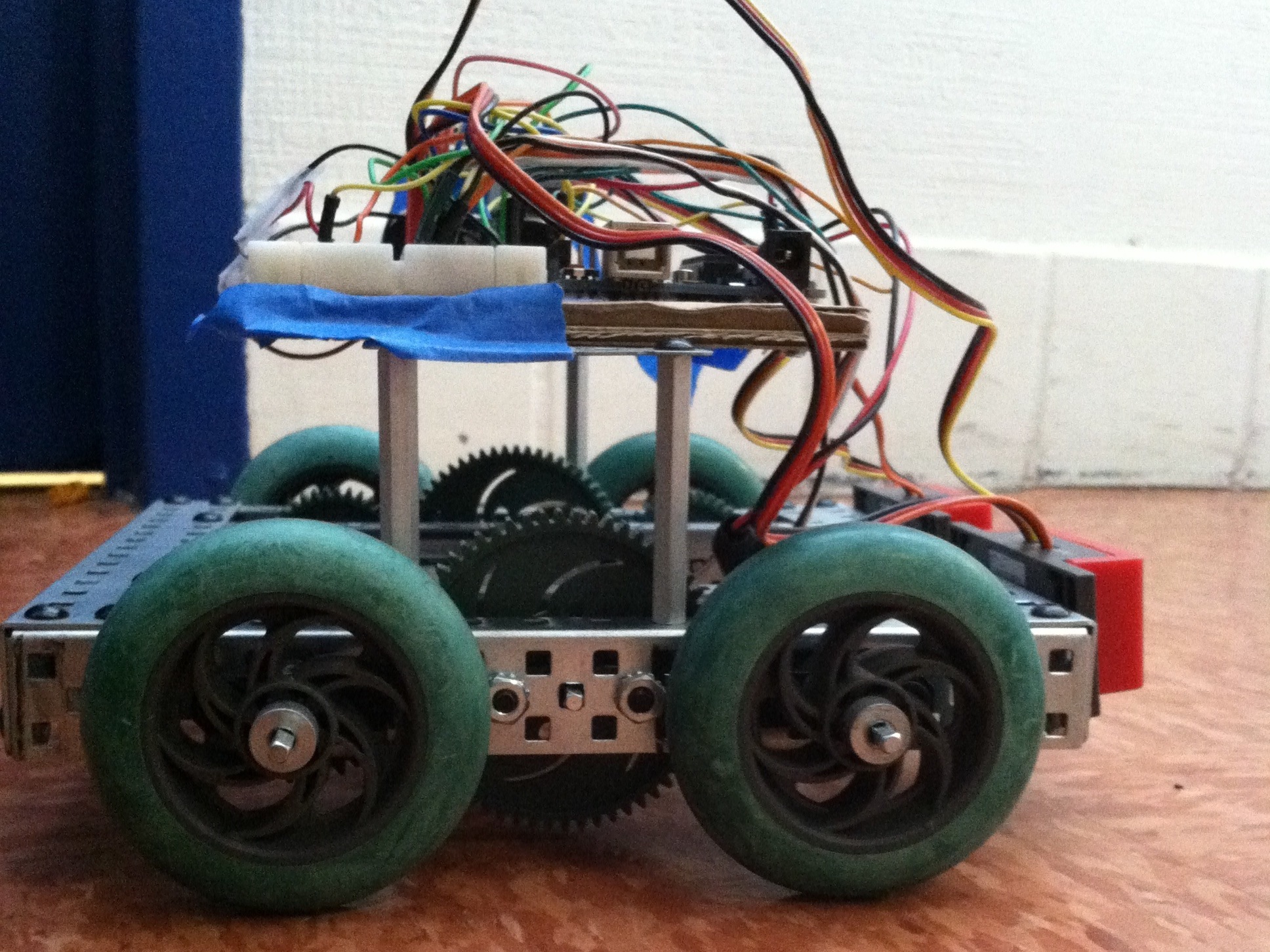
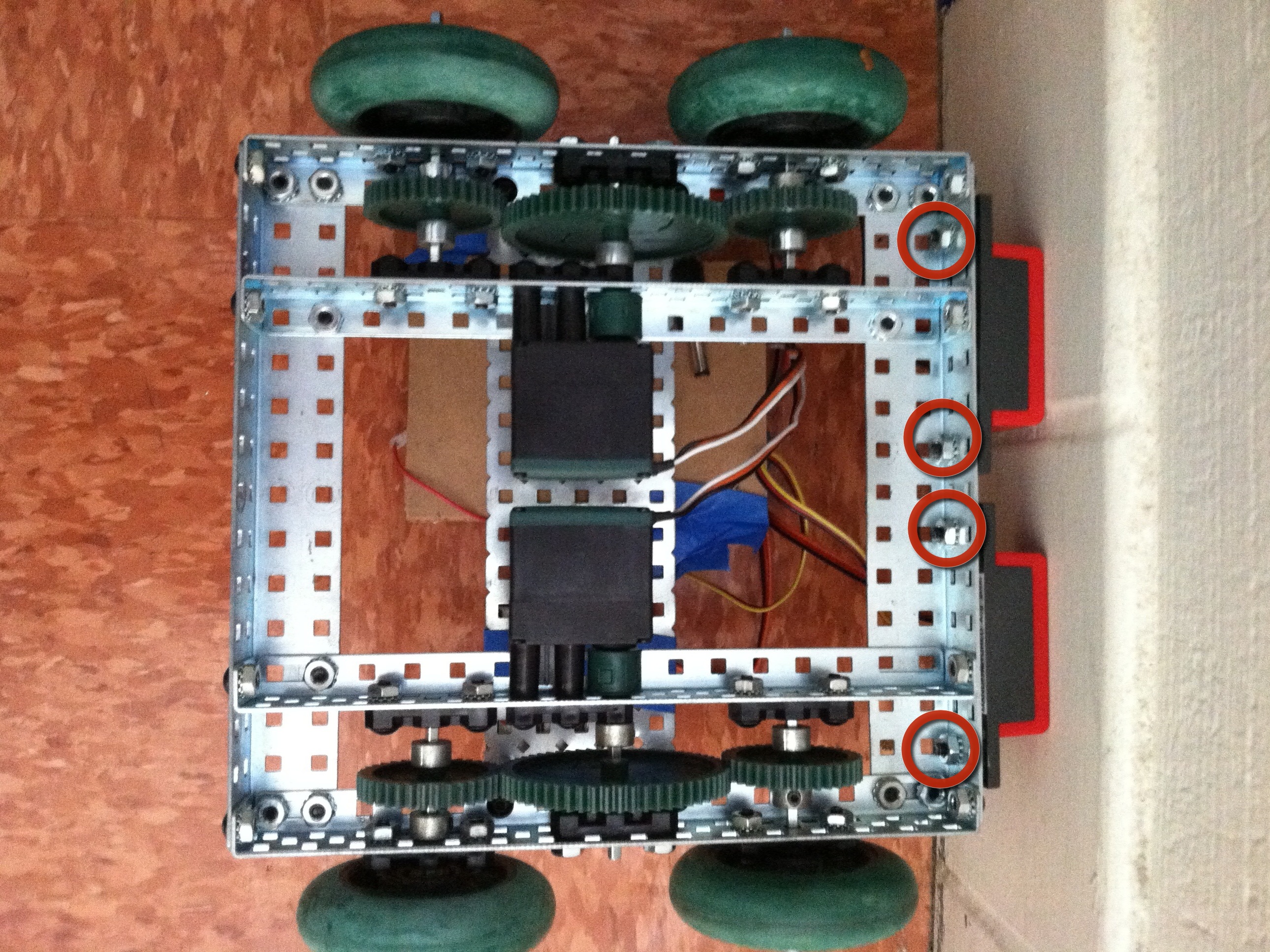
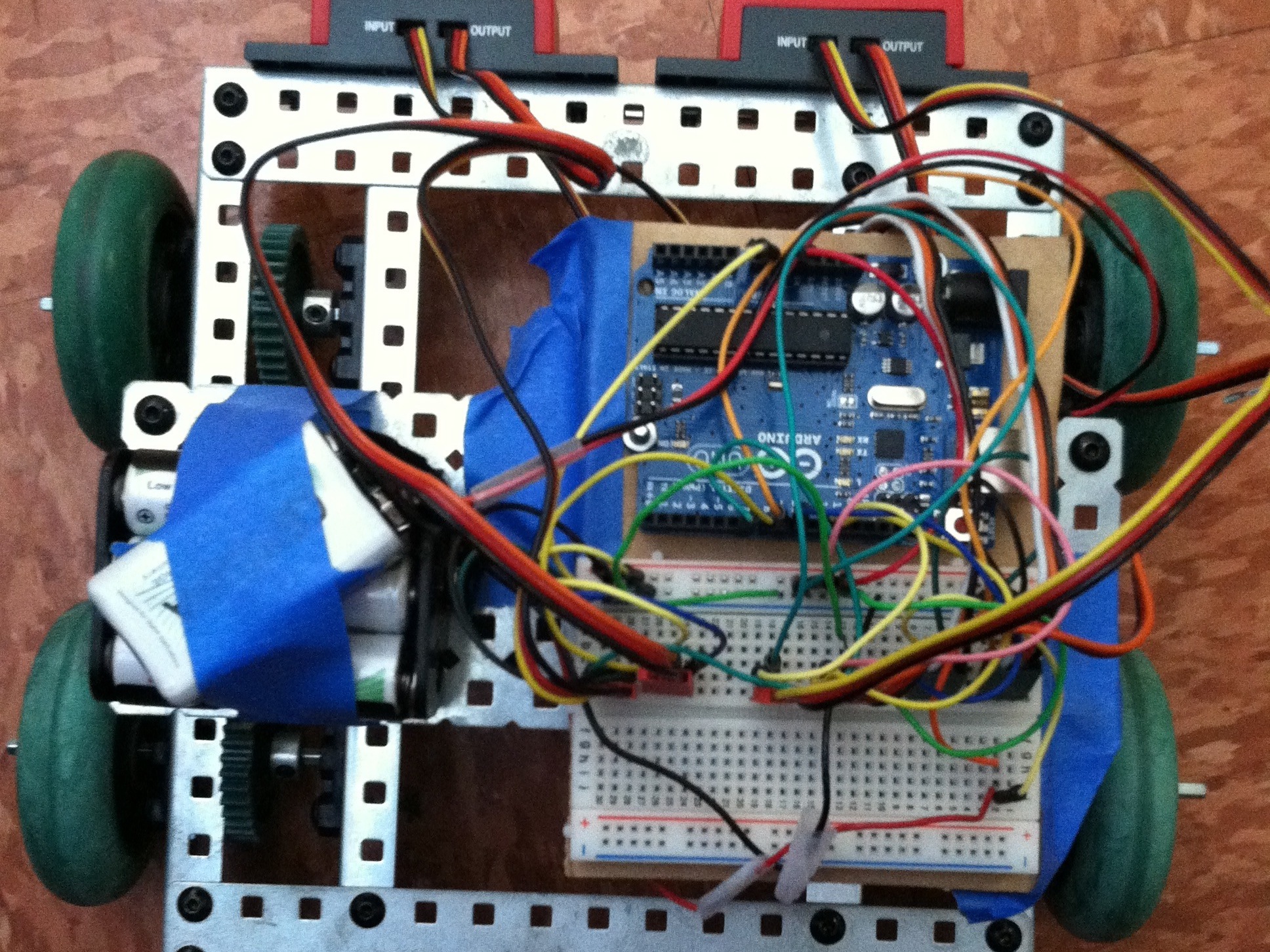
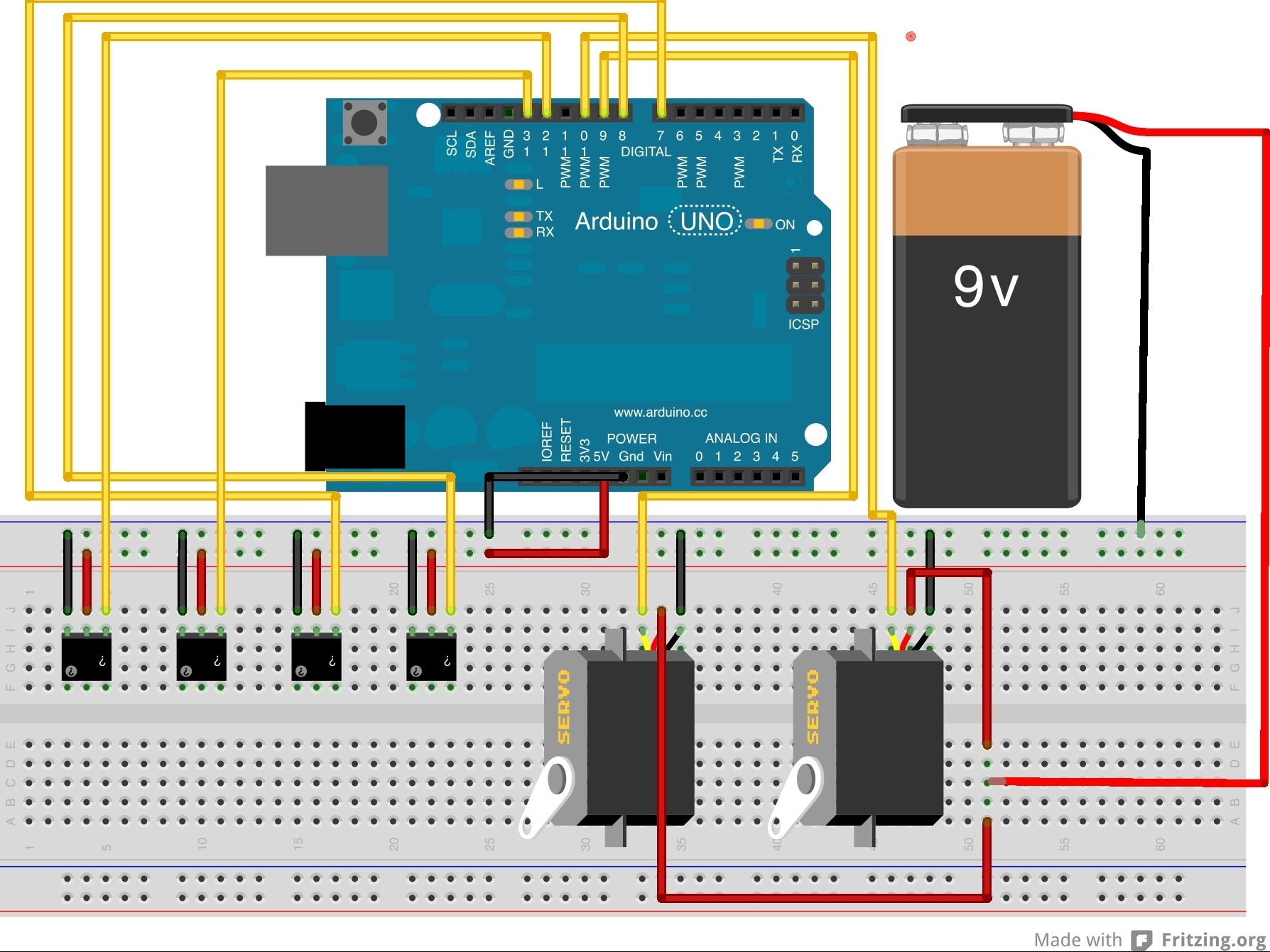
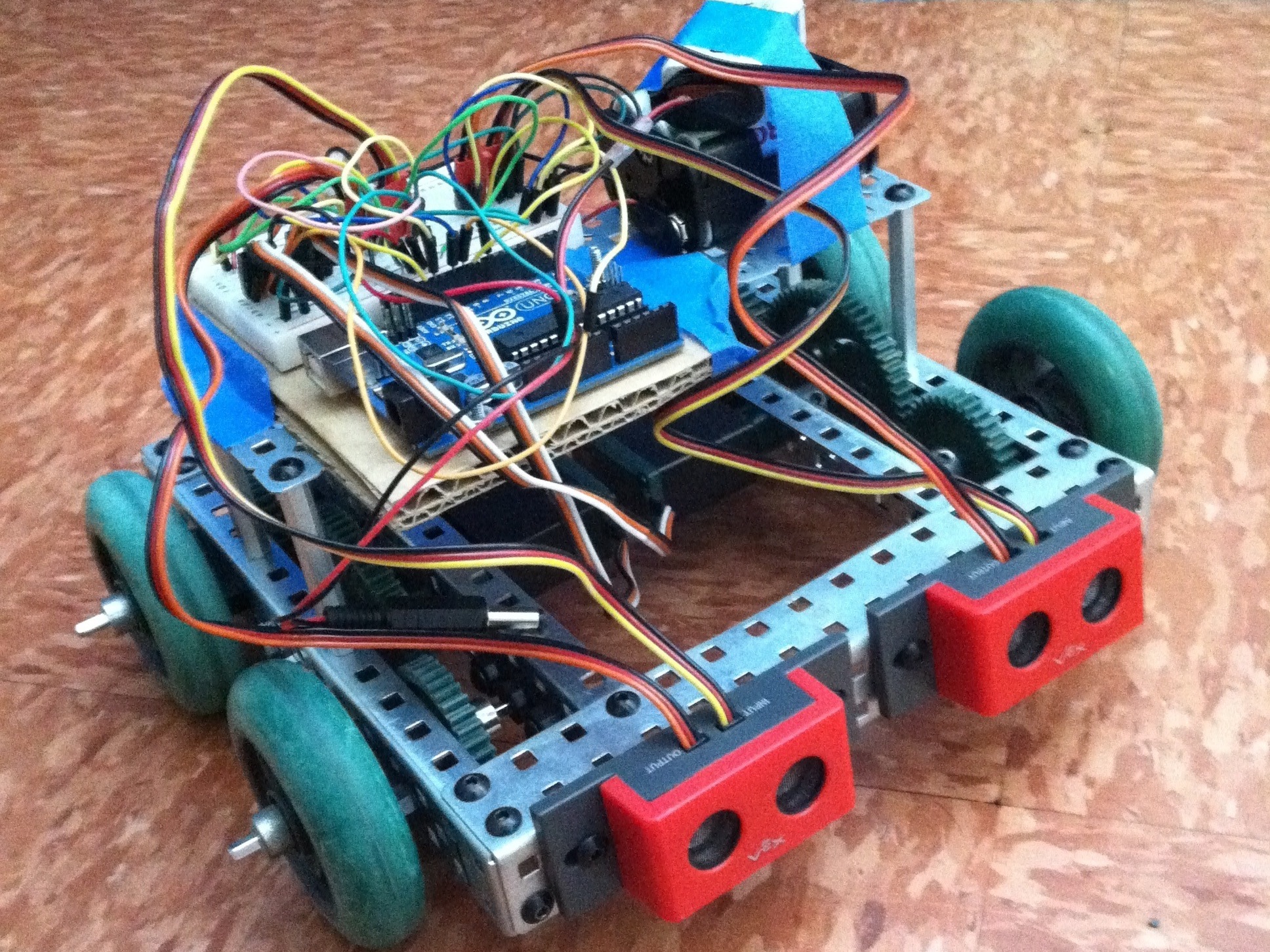
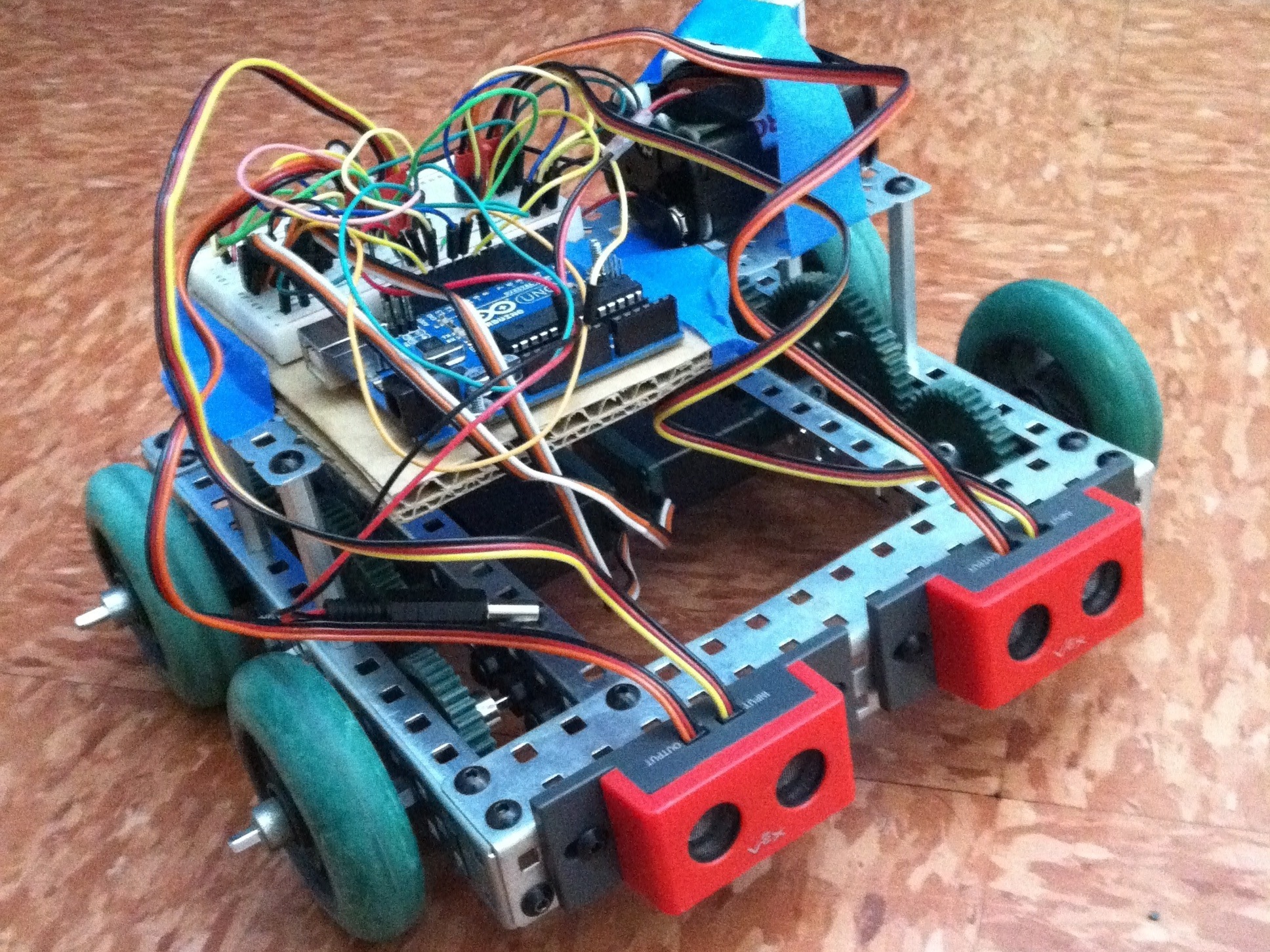
In order to do this project, a basic robot must be built that runs off of two 3-wire VEX servos. A good robot to build is the VEX Squarebot. Instructions for building this can be downloaded from PDF here or with any VEX robotics kit.