



From Singapore to the USA and all around Europe, Edible Innovations profiles food makers that engage in improving the global food system at every stage, from production to distribution to eating and shopping. Join us as we explore the main trends in the industry from a maker perspective. Chiara Cecchini of Future Food Institute — an ecosystem with a strong educational core that promotes food innovation as a key tool to tackle the great challenges of the future — introduces you to the faces, stories, and experiences of food makers around the globe. Check back on Tuesdays and Thursdays for new installments.
Robots are reshaping the way we eat, drink, and interact. From delivery, to recipe design and food preparation, their role is becoming a much more important position in our daily lives. A great example is Barbot.
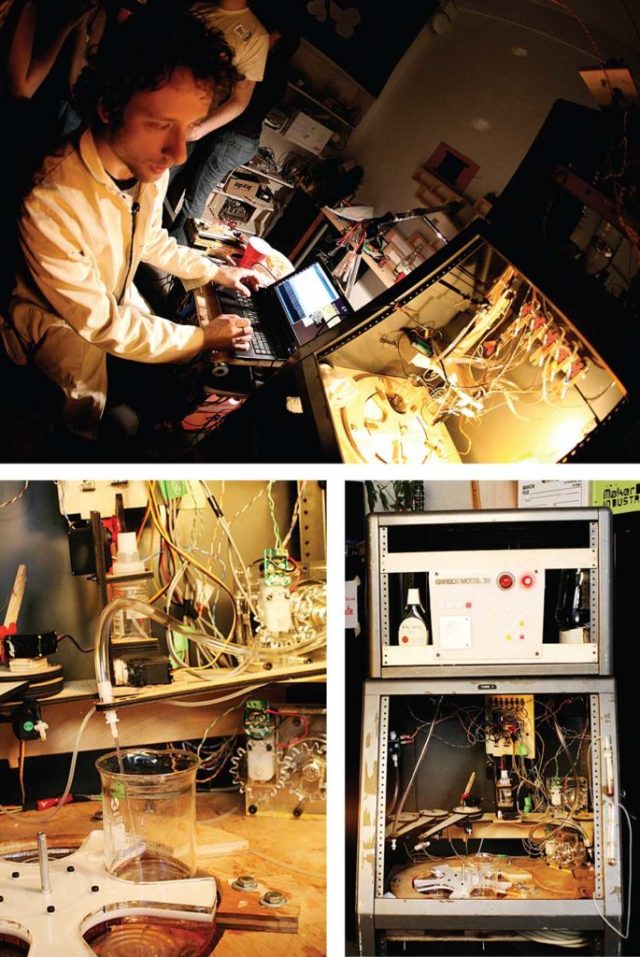
Barbot is an open source Arduino cocktail mixing robot that is controlled with a hybrid mobile app via Bluetooth. It can hold up to nine bottles and makes cocktails that can be chosen from a control panel. The mobile app can both enable and disable ingredients and edit recipes.
Barbot Series v3 is the third prototype of the electronic bartender. It has been passed from friend to friend at NYC Resistor as an evolving and collaborative project. Raphael Abrams, freelance designer and electrical engineer, has been the mind pulling together most of the parts.
How is Barbot made?
Barbot’s heart is its Geneva drive. Geneva drive is a gear mechanism that translates a continuous rotation movement into intermittent rotary motion. In this case, it divides a continuous rotation into station stops for alcohol, mixers, and bitters.
Barbot’s brain is a configurable Twitchie microcontroller board. It is based on the Arduino platform and relies on a Atmega168 chip.
How does Barbot work?
The Twitchie uses a series of pins that can transition between high and low, and use pulse-width modulation. This is inputed into a control panel that then drives a series of metal-oxide semiconductor field-effect transistors, servos, and a relay. This, in turn, controls the Barbot’s arms and liquid-delivery engines.
The control panel is a combination of LED lights and antique glass domes that indicate power and status. To initiate the drink making process, the user just keys a sequence of five buttons. The robot starts moving the glass from one filling station to another, so that alcohol, mixers, and bitters can be added and mixed (using the Geneva drive I mentioned before). Then, a peristaltic pump puts revolving pressure on a tube and forces the liquids onward. These kind of tools are commonly used in dialysis machines to transfer blood, but their mechanisms can be perfectly repurposed here.

The robot’s automation looks like a form of magic. The spell is only broken once the machine pushes a glass in the user’s direction, and gives them a LED wink in encouragement to drink up.
Barbot is a perfect example of how automation can change eating and drinking experiences. You should definitely try to make one yourself!
[Editor’s note: An earlier version of this article linked to Lukas Šidlauskas’ Barbot and barbot.us which are separate projects of the same name.]
ADVERTISEMENT
Join Make: Community Today





