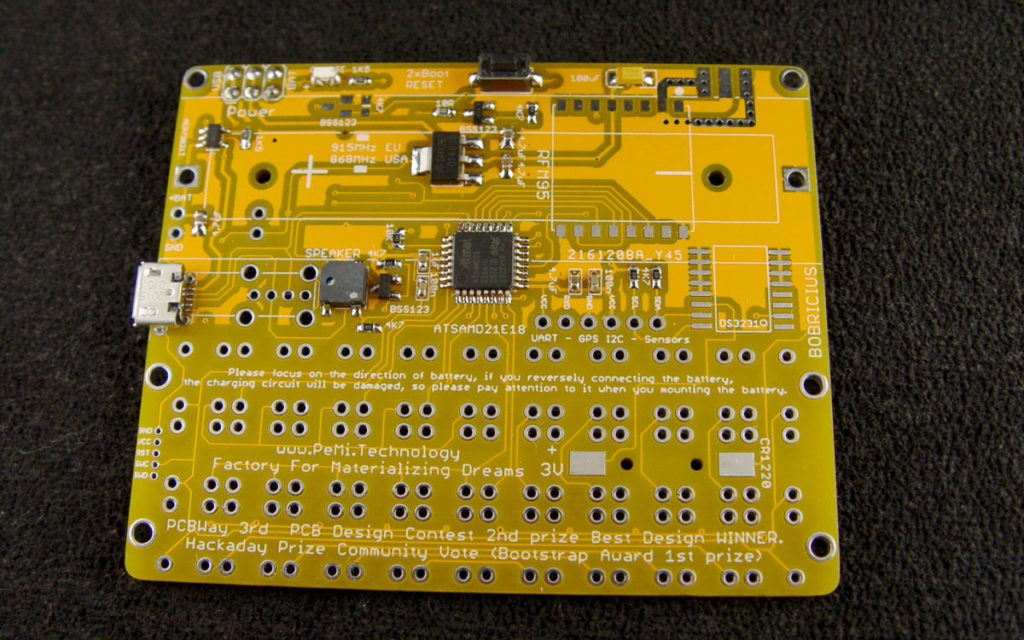
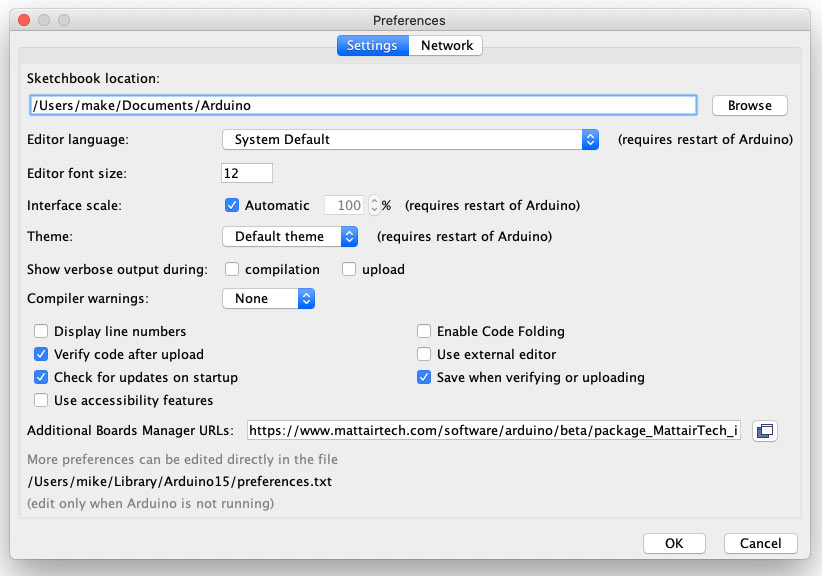
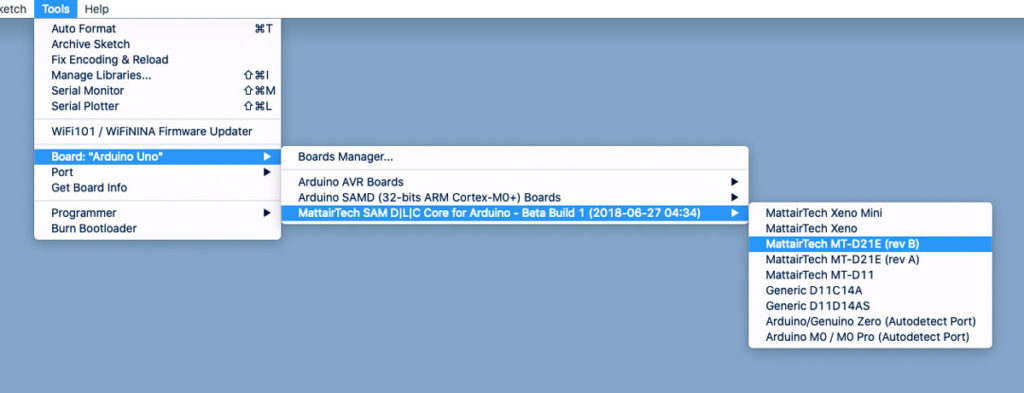
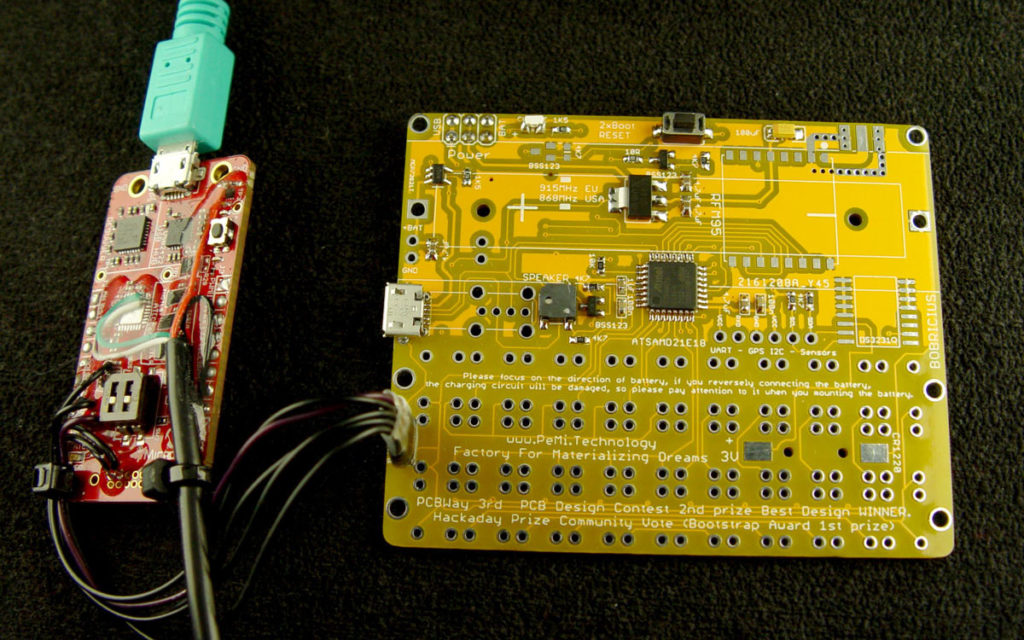
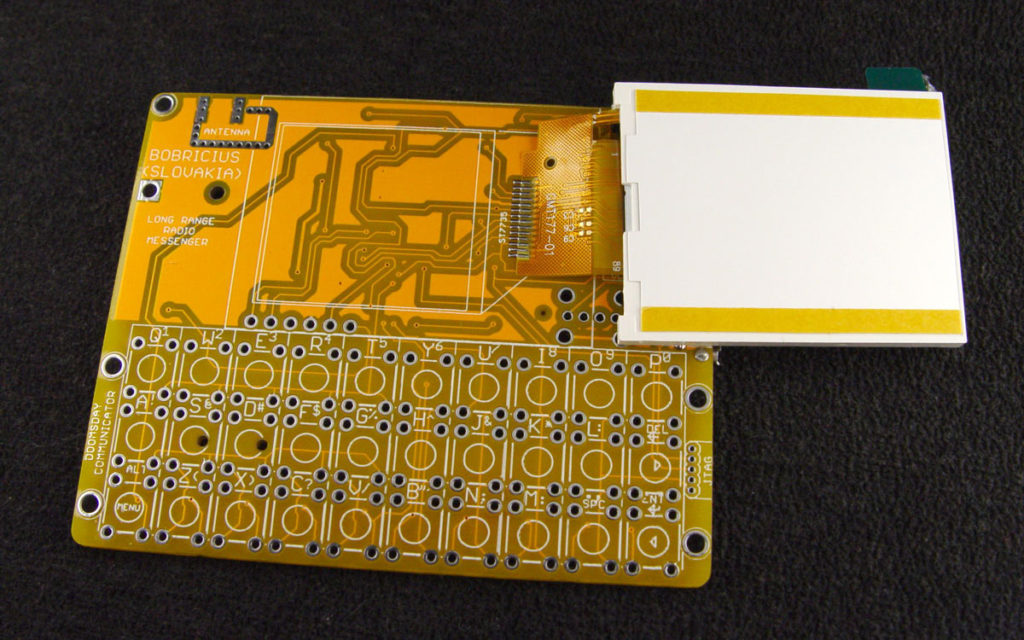
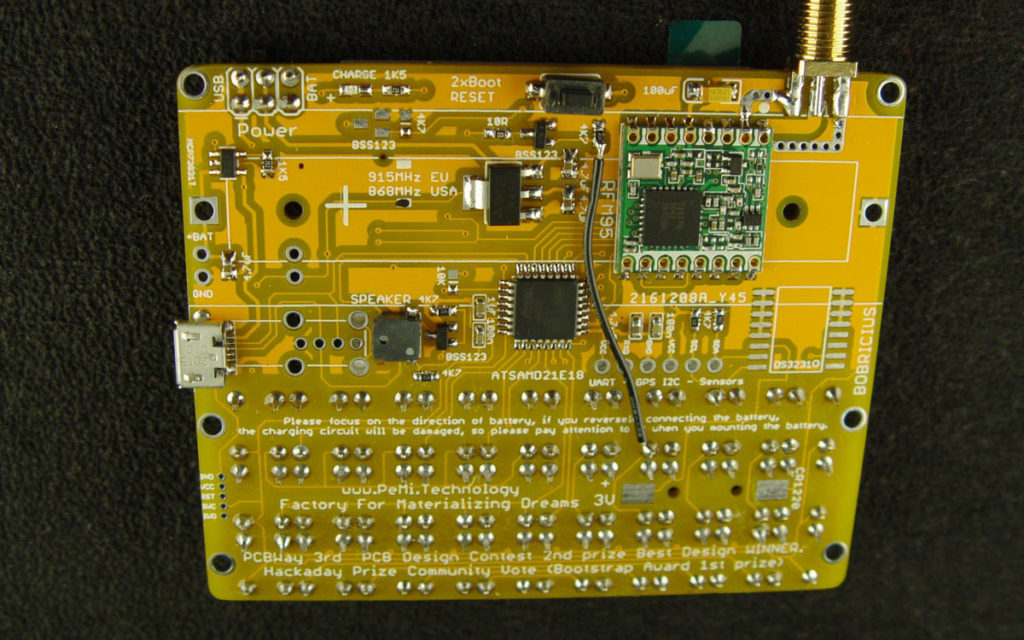
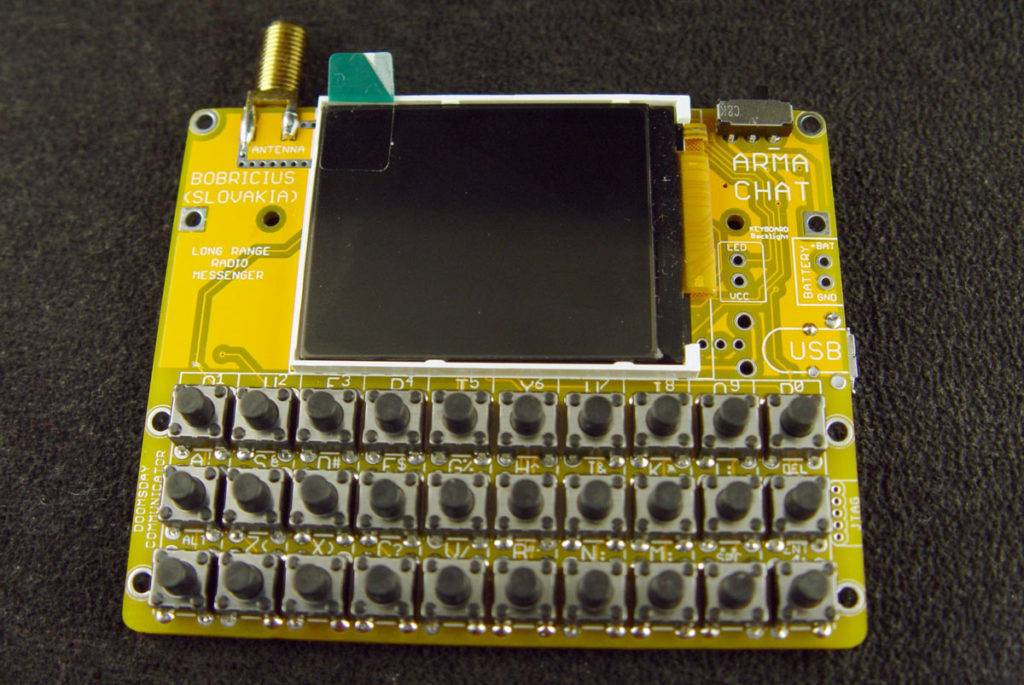
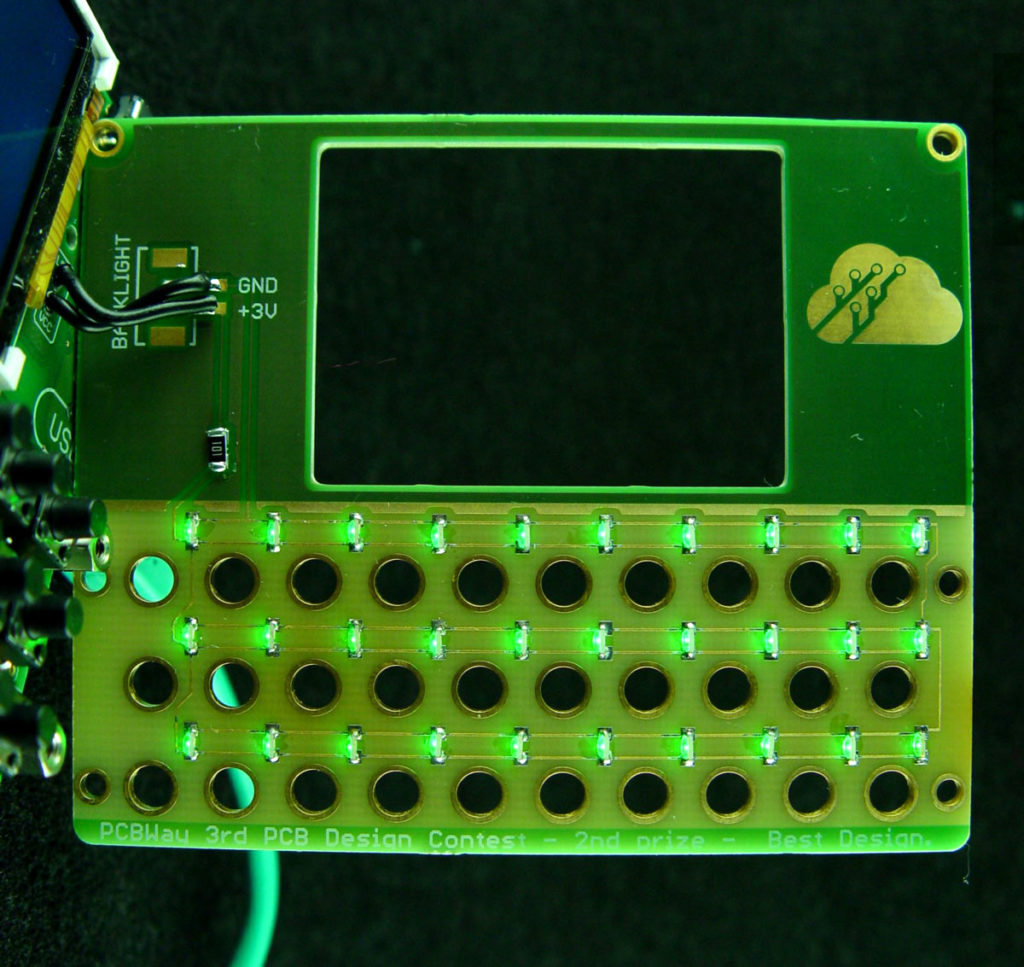
LoRa is great for long-distance sensor readings, but you can also use it for sending messages. This is my LoRa-based interpersonal communicator, called Armachat. I made it as a learning exercise to create a PCB with wireless communications and graphic displays. The device is a battery-powered, super high-tech, text-based walkie-talkie with an extremely simple and low component count (around 25 parts). I focused on using an SAMD21E18 microcontroller in an easy-to-solder TQFP32 package (same size as the popular ATmega328). Unfortunately this MCU is sold blank and needs a special Atmel-ICE device to program the bootloader — this is the hardest part of this project. Otherwise, no special manufacturing tools are required, it’s all on the PCB. The front panel can also carry optional backlight LEDs for the keyboard.
I originally called it an Armageddon communicator (hence “Armachat”) but I don’t think it would survive any imaginable disaster.
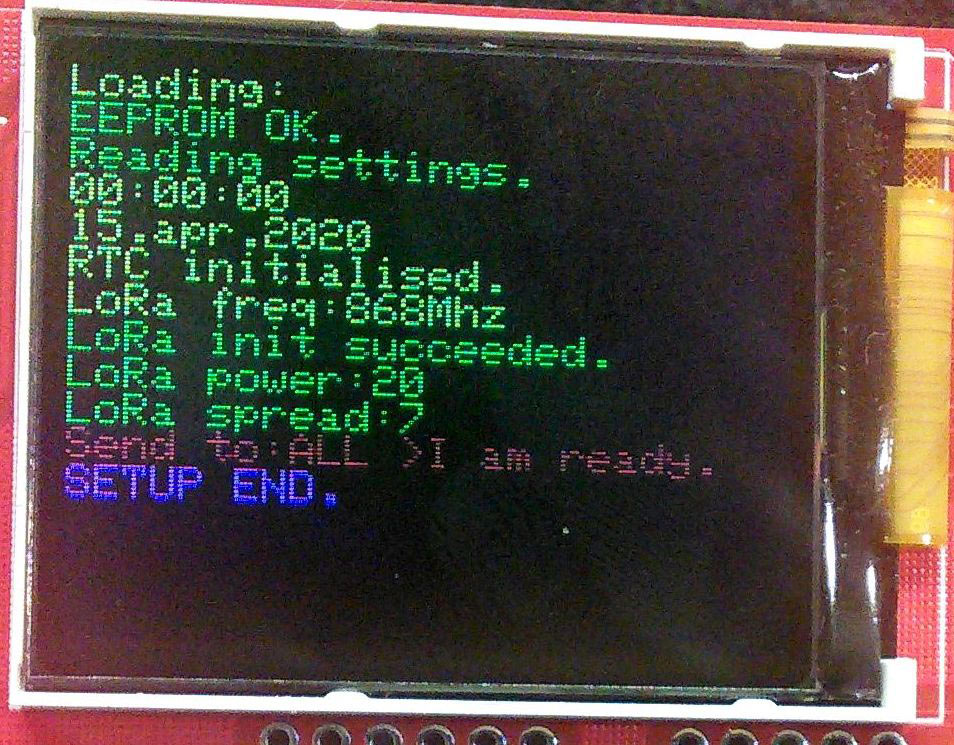
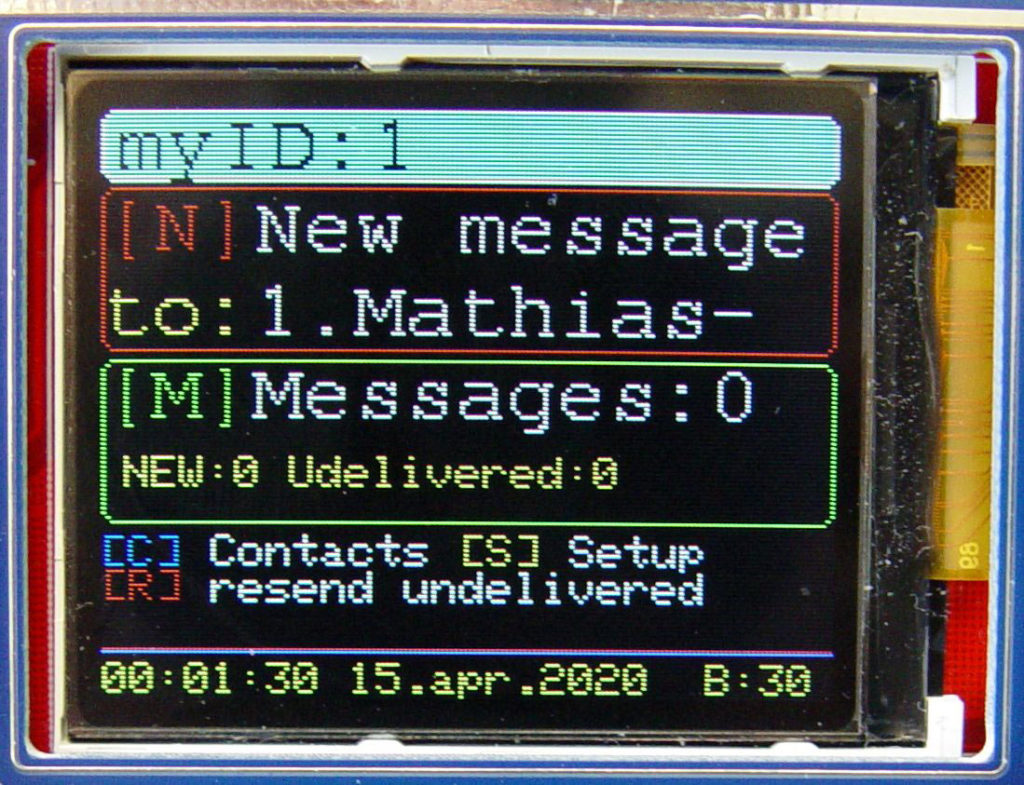
The software is not finished yet but at this point you can compose/store and send/receive messages with delivery confirmation, and resend undelivered messages from device to device with high potential to be received.

Why I Used the SAMD21E18
I chose this MCU for Armachat because it is Arduino compatible, low power, has native crystal-free USB, USB OTG, a lot of flash memory for updates, MSD bootloader from Adafruit, and you can easily update firmware just by dragging and dropping like a thumb drive. Plus, it’s cheap.
It’s also really low power; total Armachat consumption at full power with display on is 60mA — 20mA for the LoRa module, 20mA display backlit, 20mA MCU. I’m able to boot and send messages from Armachat just using power from a Stirling engine generator. You can see this on my YouTube page.
Other infrastructure-free communicators
- Meshtastic: A GPS- and LoRa-based mesh communicator system which you can use standalone or access via your smartphone: meshtastic.org
- Disaster.radio: This open source platform sets up solar-powered LoRa gateways that users can connect to via Wi-Fi to communicate off the grid. disaster.radio