The TurtleBot mobile robot is designed for both academic and hobbyist researchers. The open-source hardware design provides excellent documentation for adding modifications and extending the capabilities of the robot in hardware or software. The robot is available for purchase as a kit or, if your research budget is limited, this guide will help you build some of the aluminum parts necessary to build your own.
Projects from Make: Magazine
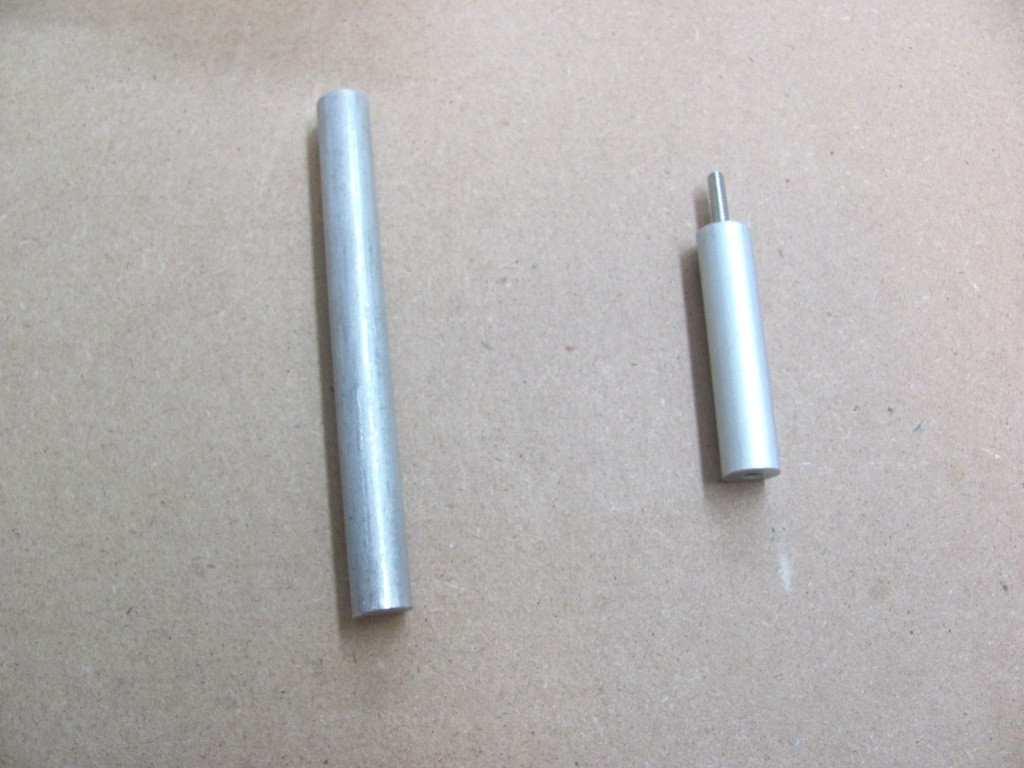
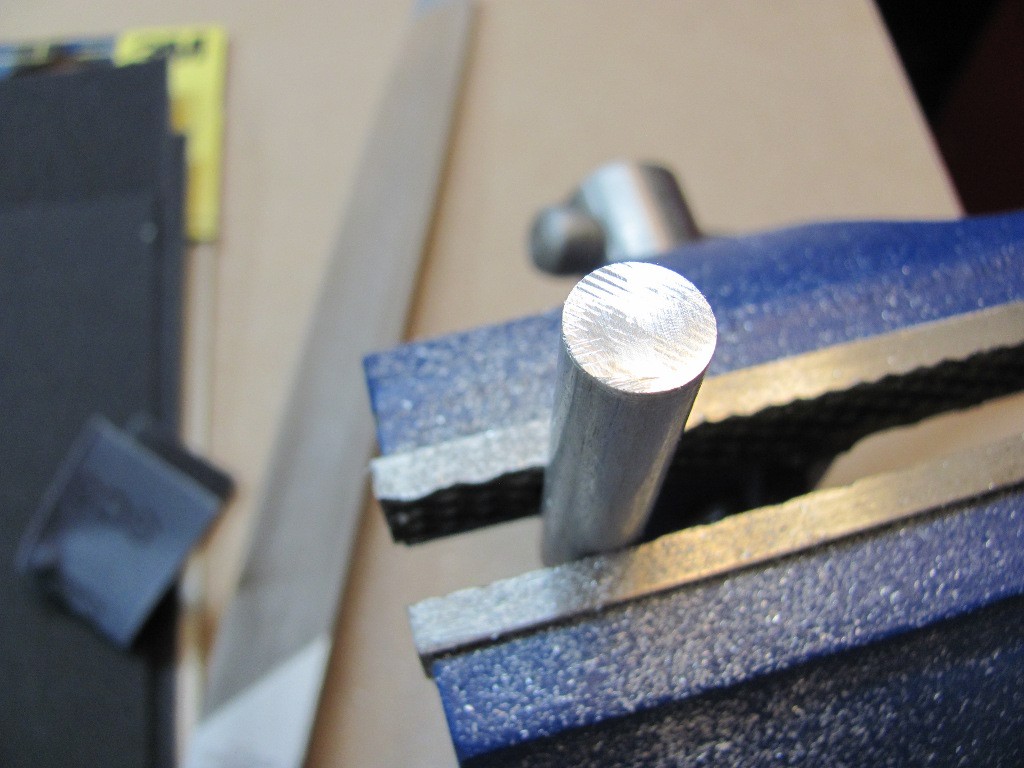
Build Your Own TurtleBot: 2″ Standoff
How to build your own TurtleBot. This covers building the TurtleBot 2" M-F Standoff part.