


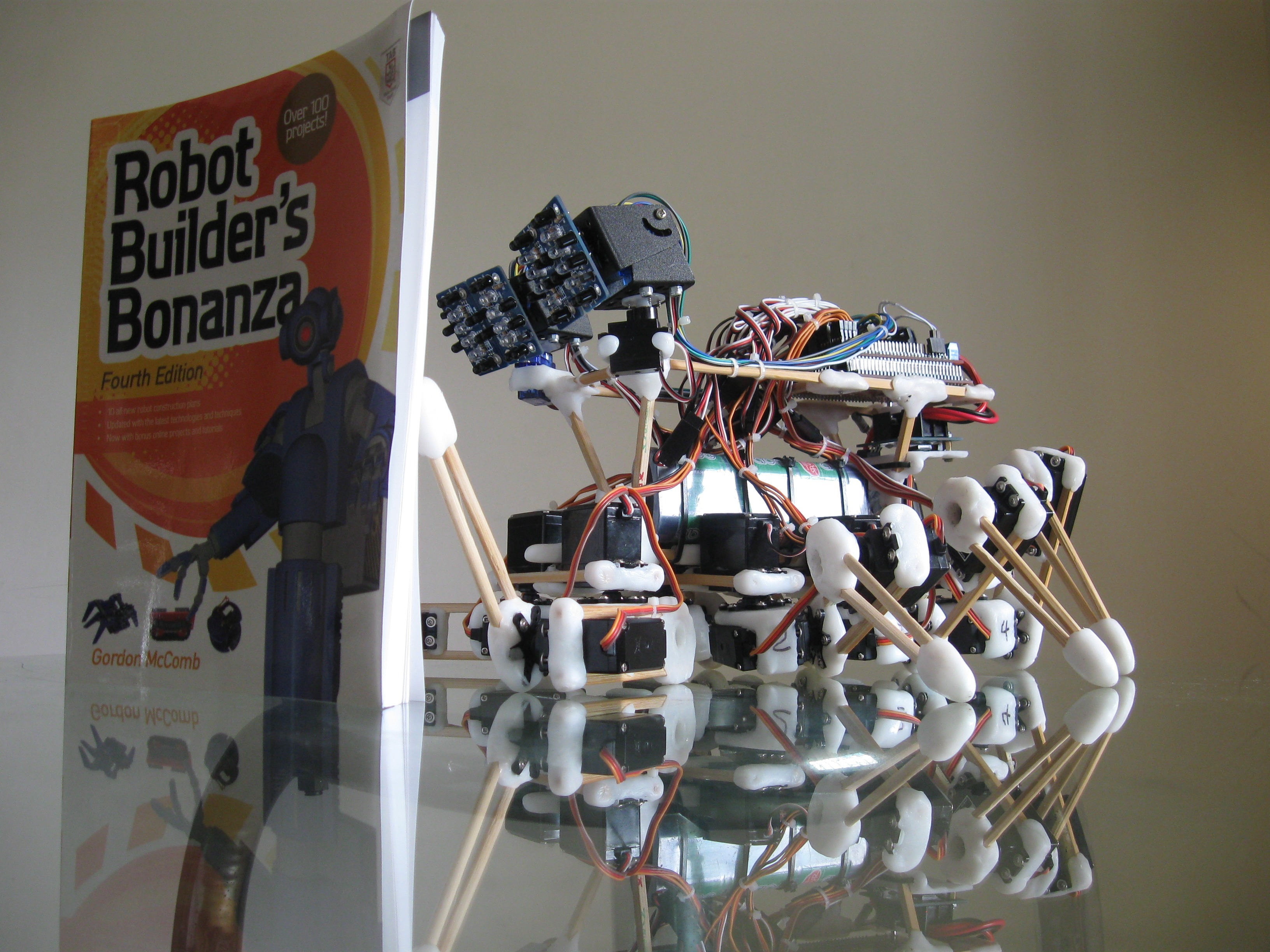
Multi-limbed robots such as hexapods can be very complex and expensive. This is a relatively cheap and simple 8-legged robot made with chopsticks, Polymorph and an Arduino-compatible controller. Most of the servos cost under $8 if you shop around. I have seen the 12Kg/cm servos for as little as $13 at HobbyKing.
The construction is pretty easy but takes time as you often have to hold parts in position and wait for the Polymorph to cool. Patience is definitely a virtue. Cold weather will speed things up.

This project will show you how to make an 8-legged spider robot. As you need 3 servos for each leg the servos are the most expensive component. You can make fewer legs for a quadruped or hexapod if you wish to save money.
I used two pan/tilt kits fitted with IR compound eyes for close-range object tracking. These are relatively cheap and give your robot the ability to play with people which adds a lot to its personality. See the videos below.



