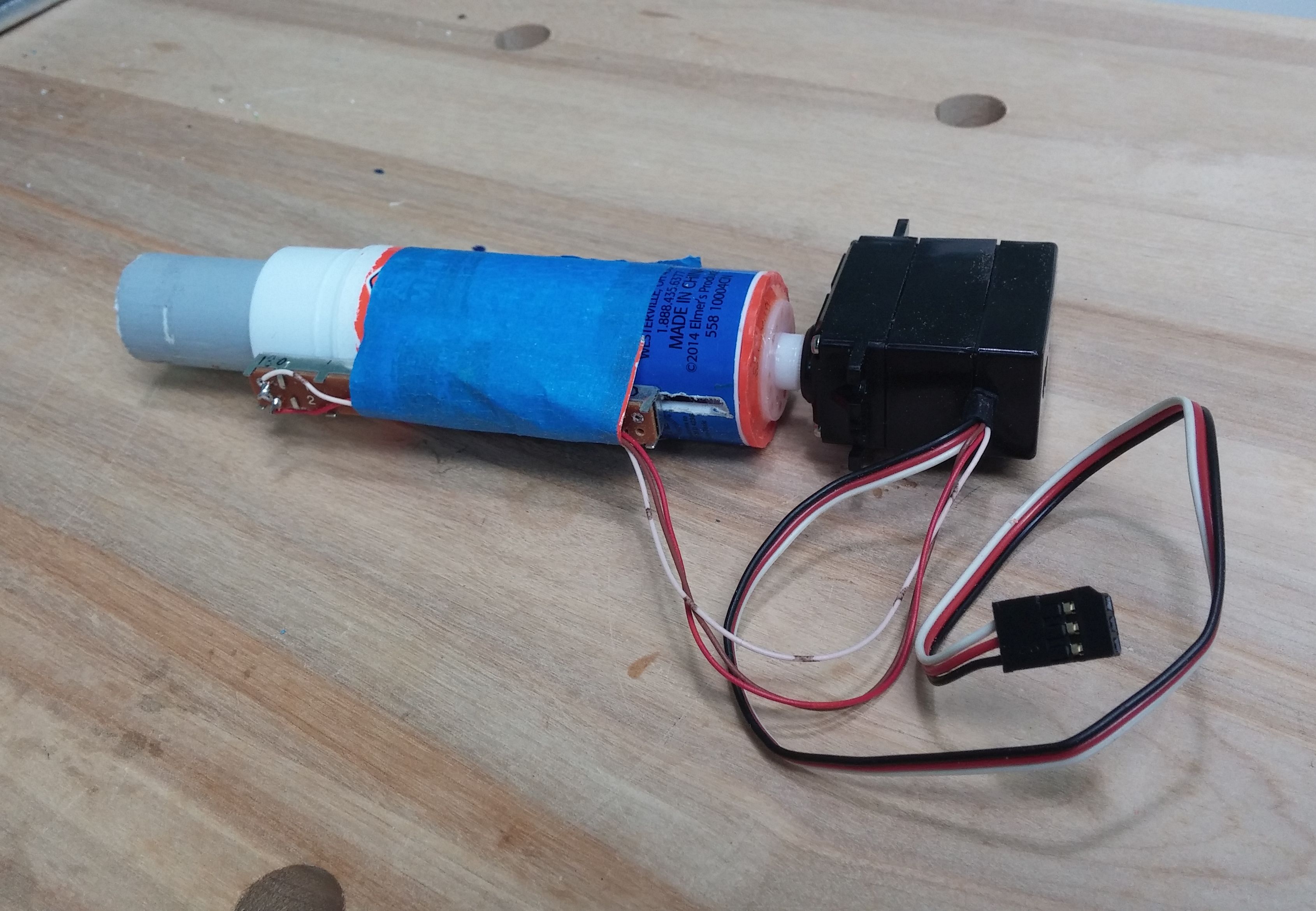
A linear actuator is a mechanism that pulls or pushes a load along a straight line. Pneumatic and hydraulic pistons are examples. So are the threaded rods on 3D printers.
Commercially available linear actuators can be quite expensive, but now you can build your own with just a few dollars worth of parts. Gareth from Let’s Make Robots explains the idea in this post.
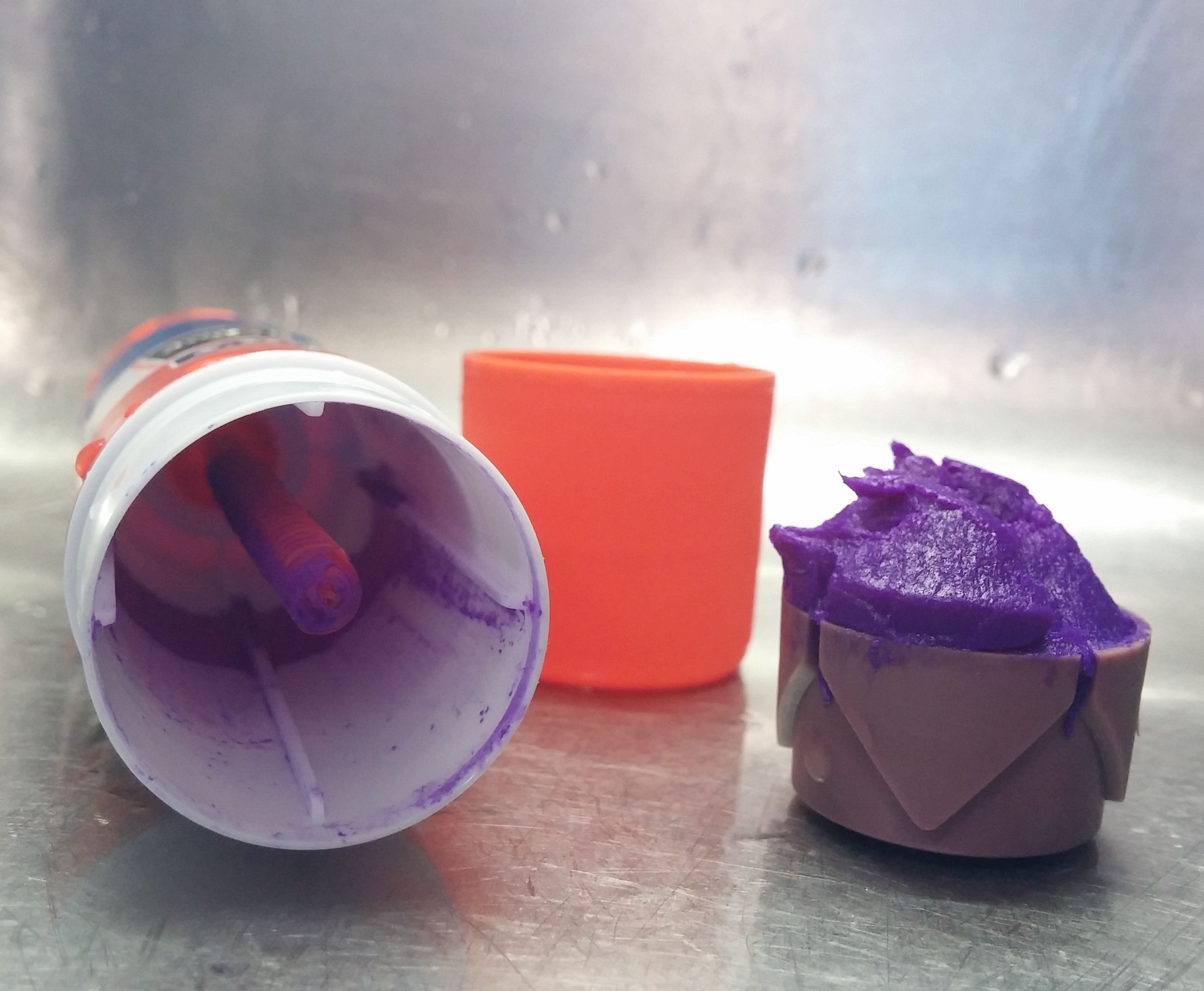
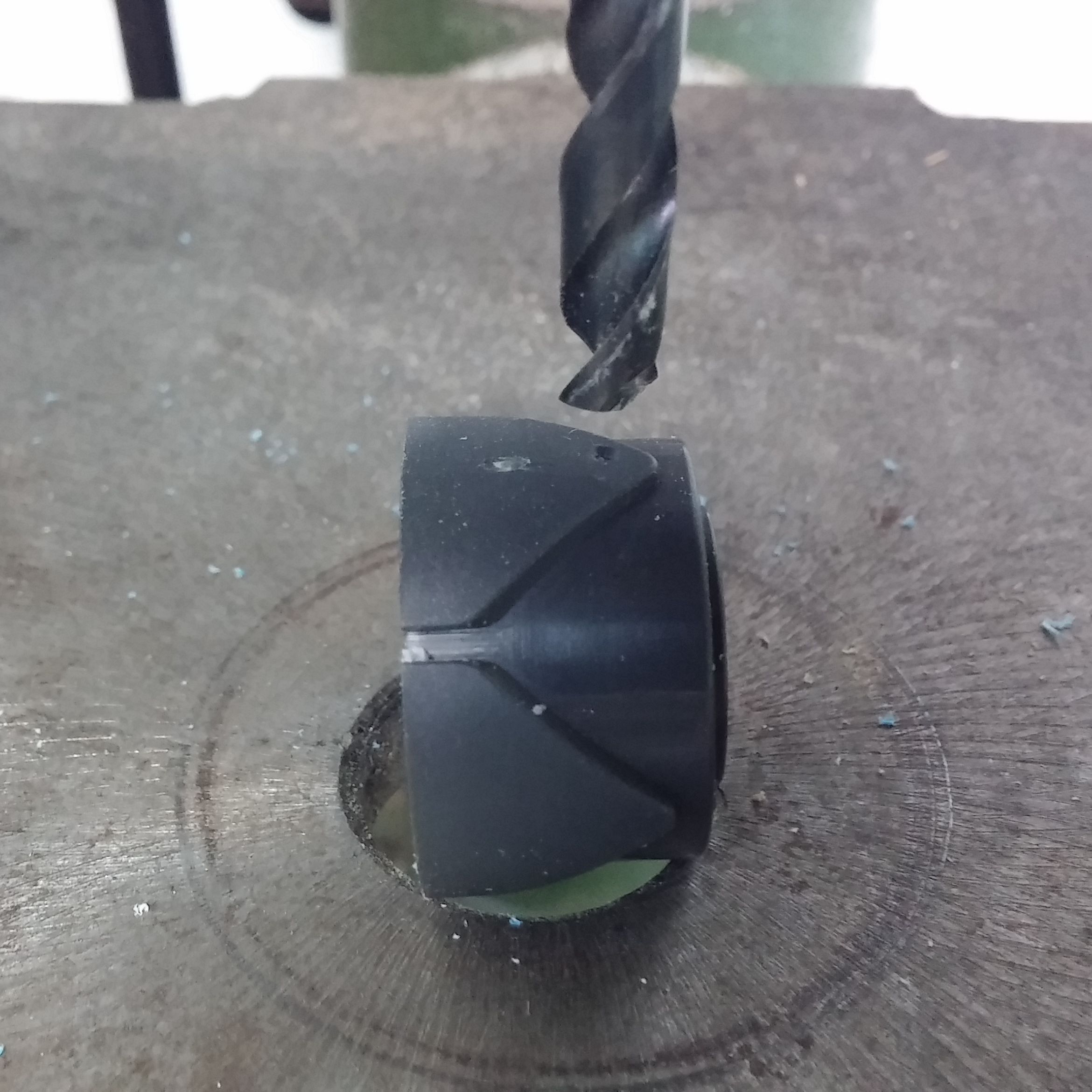
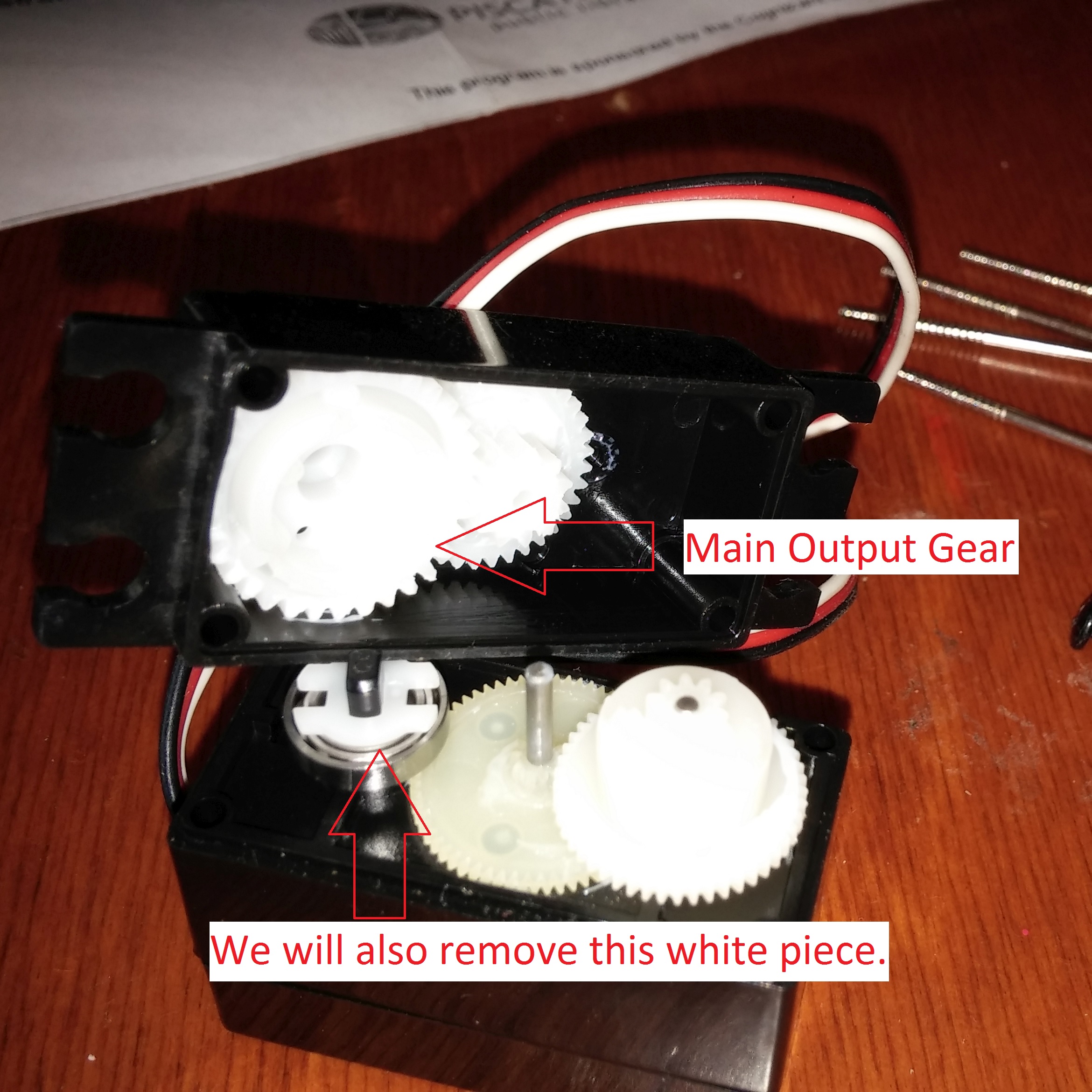
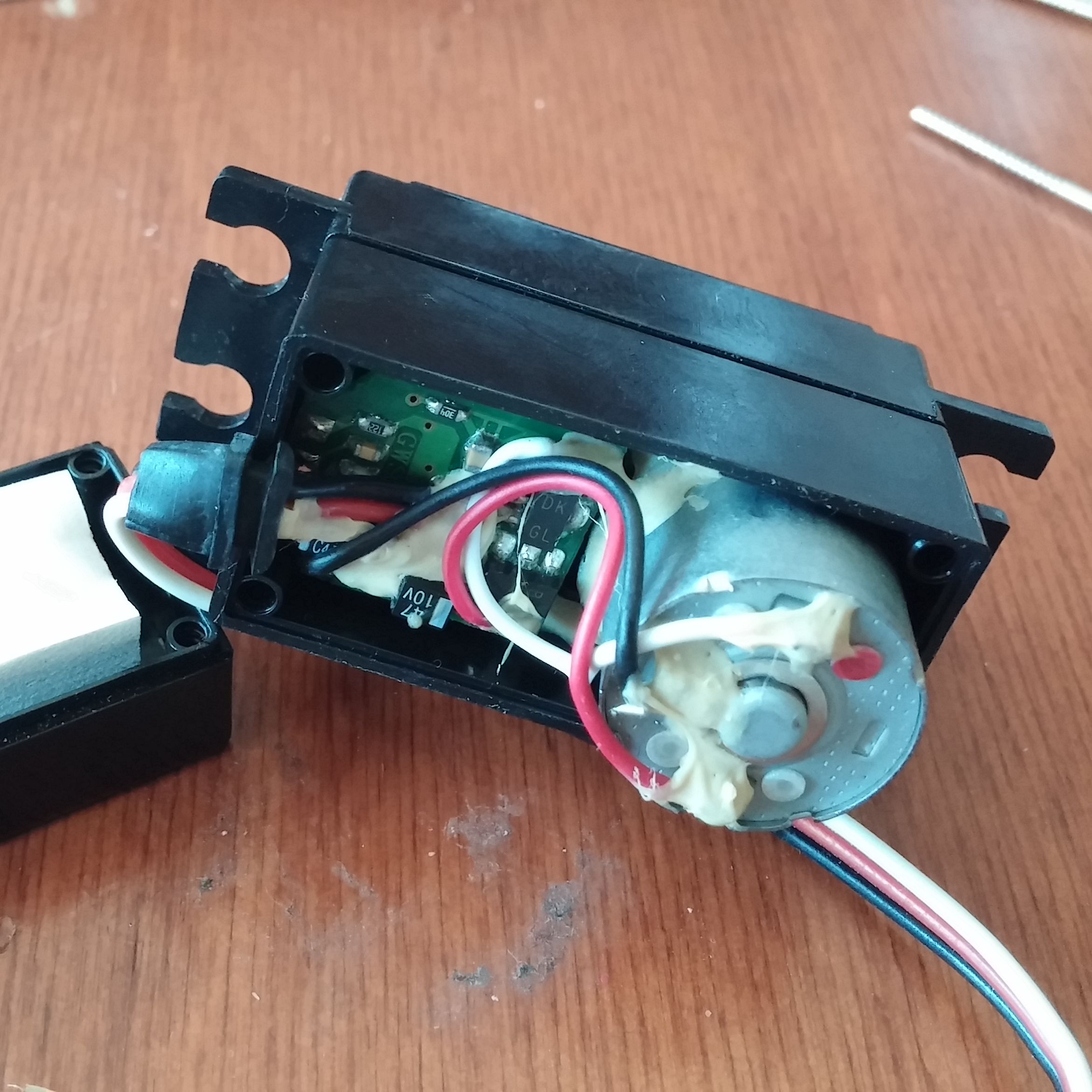
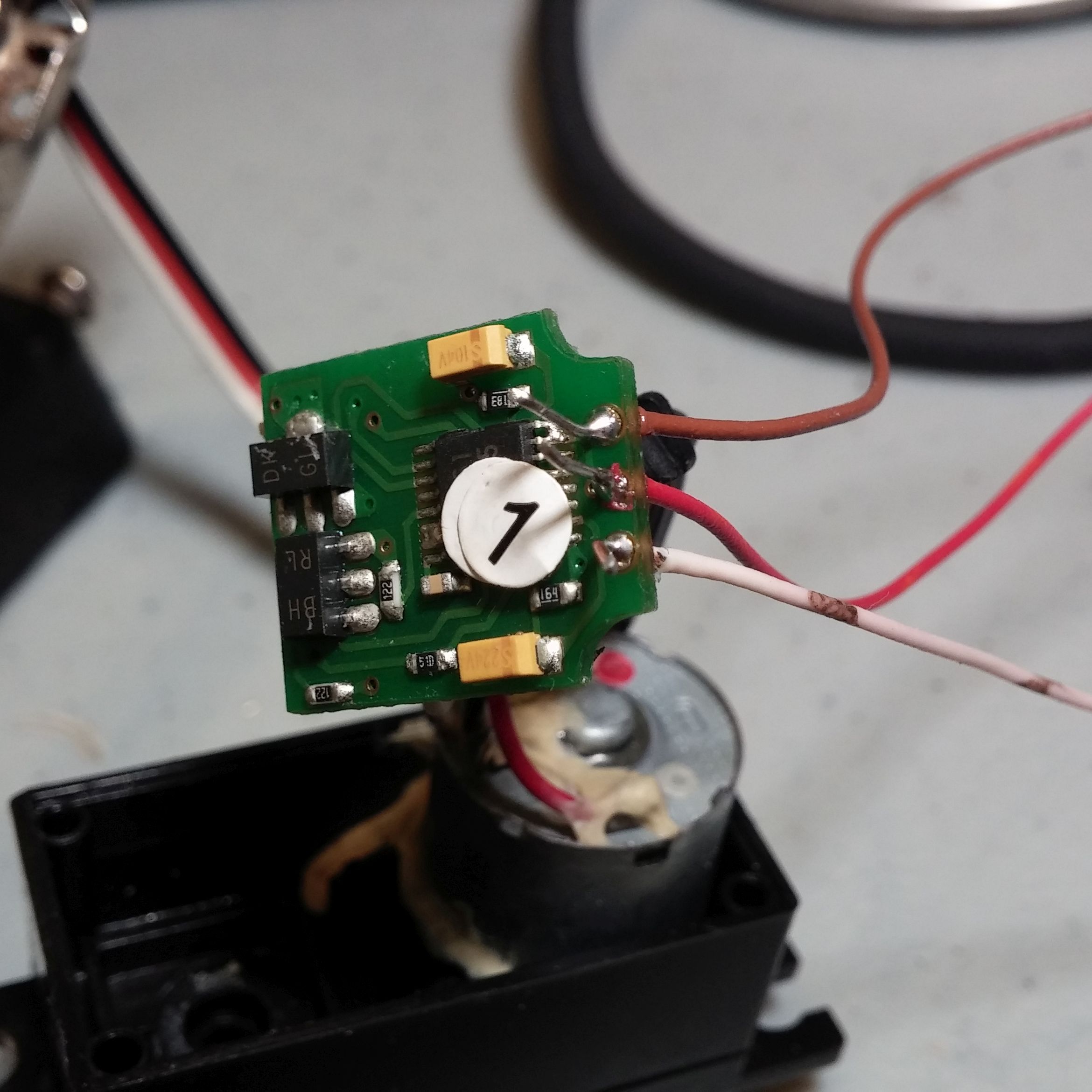
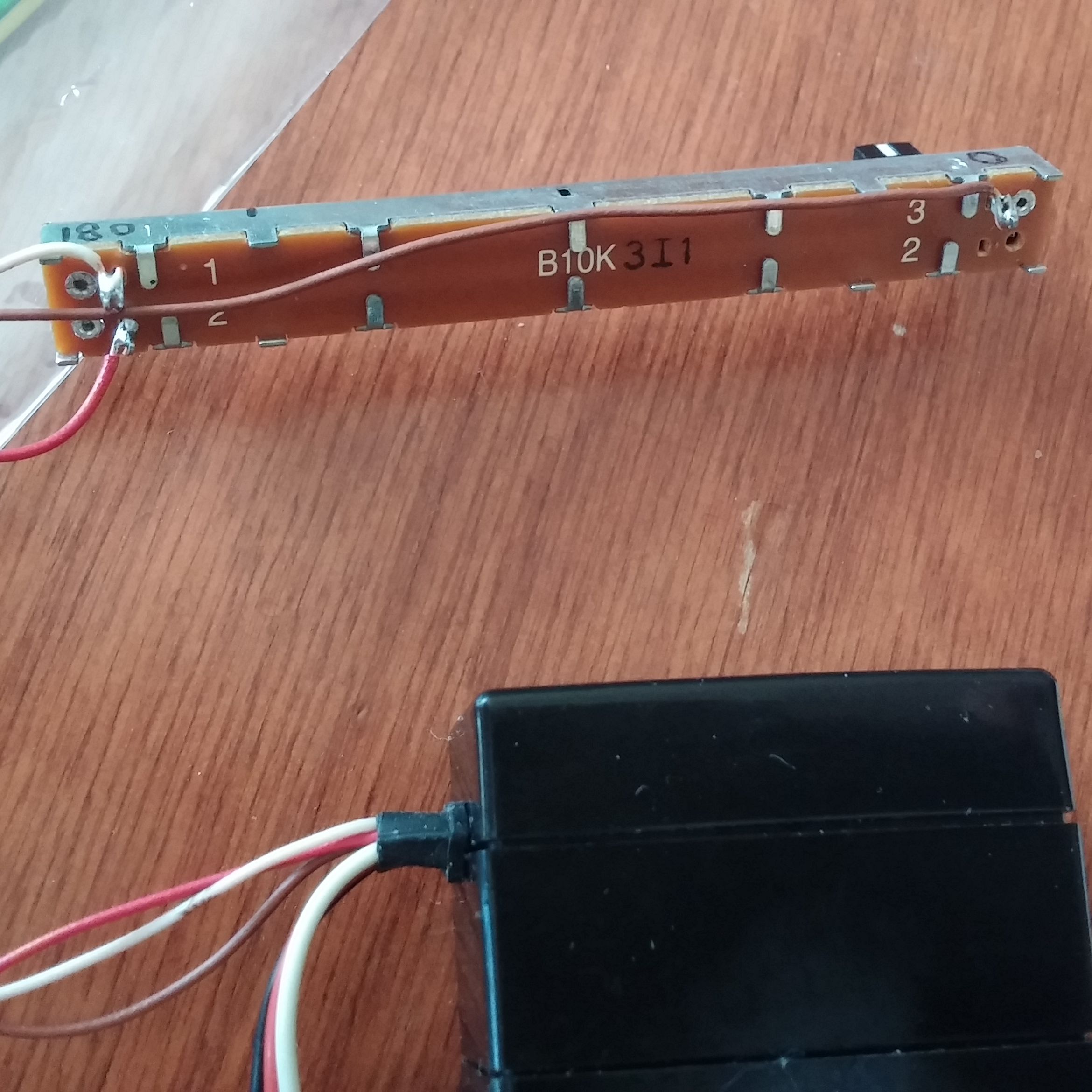
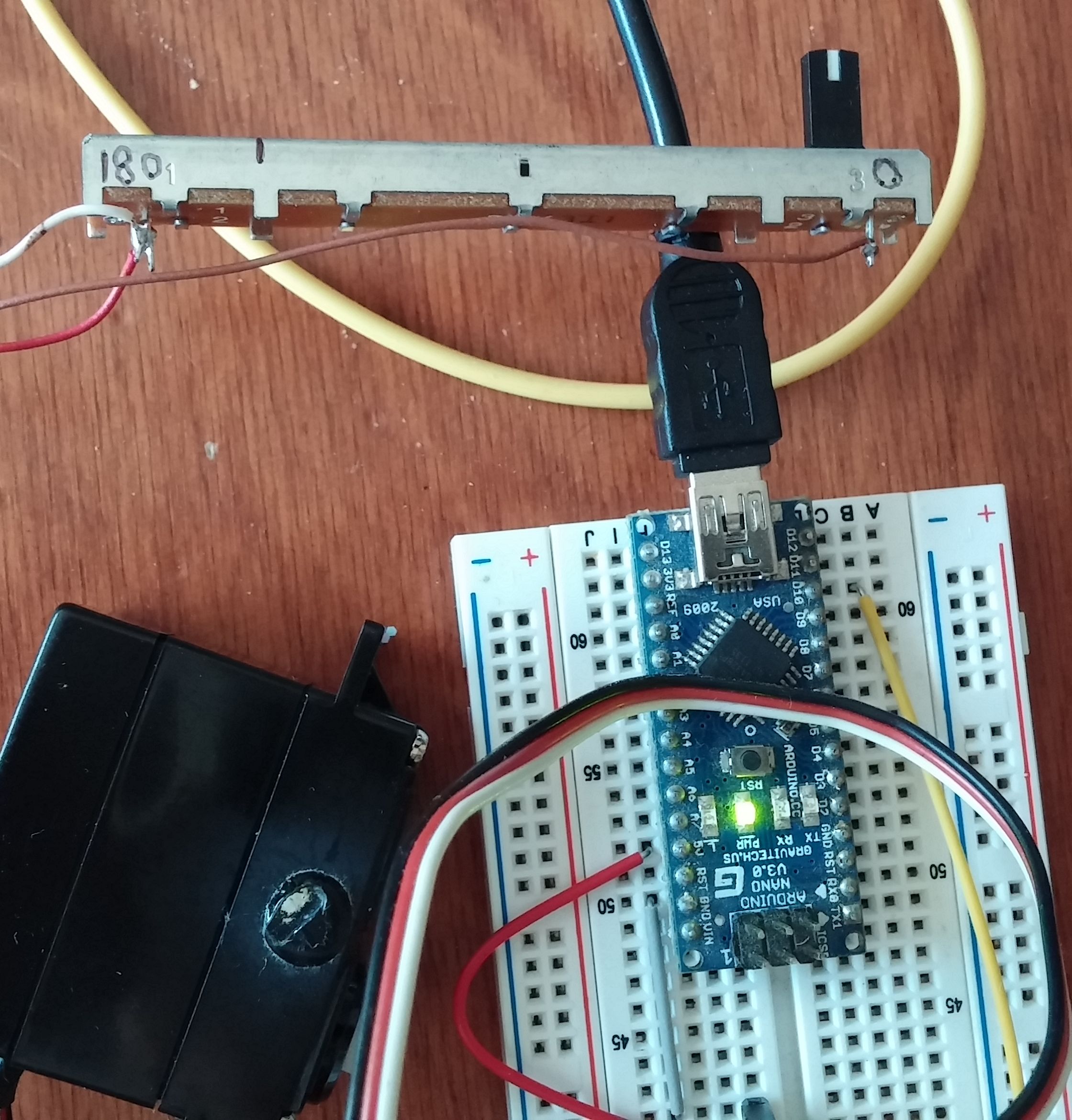
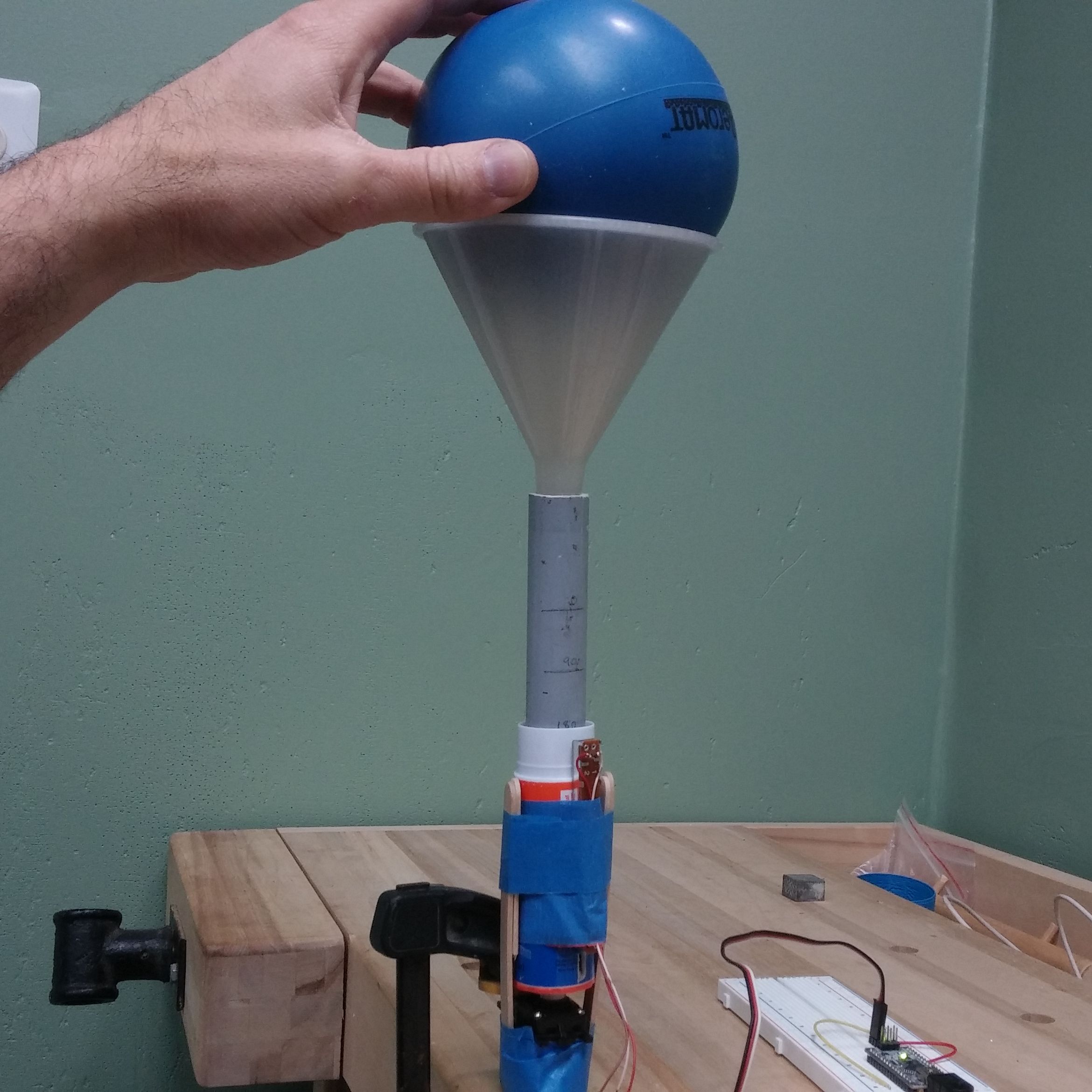
The main mechanism is salvaged from a used glue stick. By using a modified hobby servo to drive it, this actuator even comes with positional feedback. It is both surprisingly accurate and surprisingly strong. Check the video to see the finished actuator lifting a 6 lb weight!

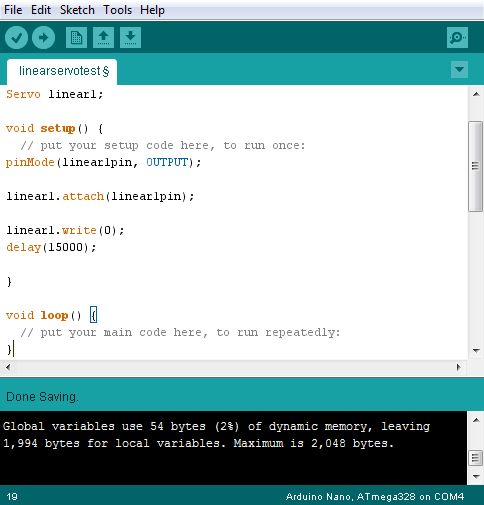
The mechanical advantage of the screw drive in the glue stick lets this servo lift much more than it could normally. Try this build out, and then see if you can integrate a linear actuator into your next robot!