




One of the more promising areas of robotics research for me right now is in universal end effectors. One of these techniques that’s gotten a lot of attention in the last few years is the balloon type effector (and similar schemes), a pneumatically-controlled rubber bulb that can be deformed/reformed around an object. These are so easy to engineer that even robot hobbyist can create them. We even have such a tutorial, written by Jason Poel Smith, here in Make: Projects.

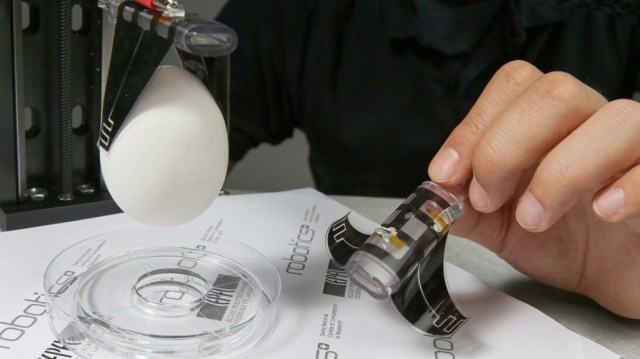
While such a scheme shows promise in many applications, and has the added benefit of being relatively low-tech, there are still applications that are unsuitable for this type of gripper. Enter electroadhesion and the work being done at the École Polytechnique Fédérale in Lausanne, Switzerland. As the above video shows, a team there has been experimenting with the use of electroadhesion to create end efforts that can pick up such fussy cargo as an egg or a sheet of paper.
So, how does electroadhesion work? When positive and negative charges are applied to adjacent electrodes of the rubber flaps, an electric field creates opposite charges across the flaps, causing electrostatic adhesion between the electrodes. Besides the technique’s ability to handle delicate objects, it also delivers impressive clamping pressure, reportedly up to 100 times its own weight.

Applications for this technology could include delivery drone grippers, industrial sorting robots, space robotics, humanoid robotics, and human prostheses. I don’t think any robot hobbyists have experimented with this technology yet, but it doesn’t seem that hard to replicate. It’s going to be interested to see what people do with this technique going forward.
You can read a brief paper on electroadhesion here. The paper that the team at École Polytechnique published is not publicly available, but you can preview and purchase it here.
[H/t Technology Review]
ADVERTISEMENT
Join Make: Community Today





