![]()

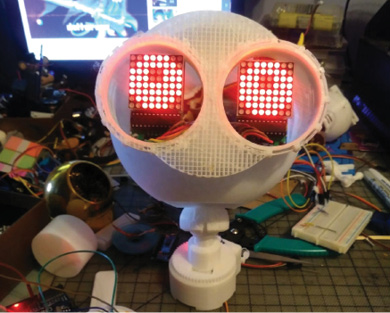
Allow me to tell you the tale of my robot monkey. Last year was a big year for me and my companion bots, entering the eye of the maker world: I even got invited to talk at Hackaday Superconference. Thanks to that event, and me being told about it three months prior, I began working on my robot monkey companion, Dexter.
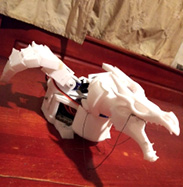
What’s a companion robot? To me, it’s a robot you can take with you on any type of adventure, the way R2-D2 rolls next to Luke Skywalker. I started making them in 2018 and couldn’t stop. When adults see me with a companion bot they might think it’s weird or ask me a polite question, but kids get so excited: “OMG, it’s a robot!” They know where it’s at.




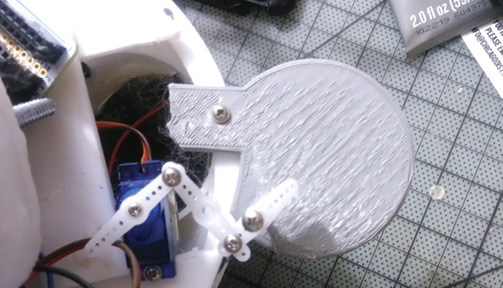
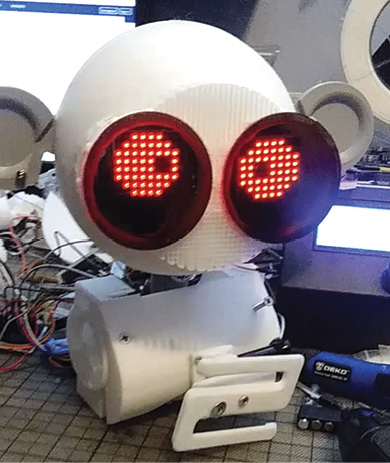
Dexter was a 4-month journey of failure. Dexter V1 was fragile like a baby; I took him out one day and he snapped in half, wires everywhere. Dexter V2 was much sturdier, and I added fingers and constantly kept upgrading him; a lot of things worked, and did not work. I even upgraded him to V3 at the Hackaday event, inspired by some amazing makers there: I gave him his new custom eyes, improved his movements by changing up some screws and adding a power booster, and reprinted a new face for him. Then I showed him off at Maker Faires in Los Angeles and the Bay Area.
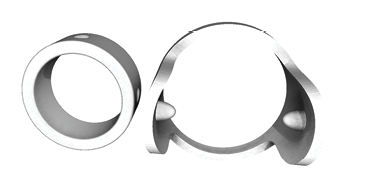
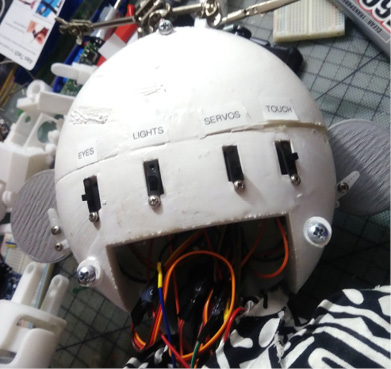
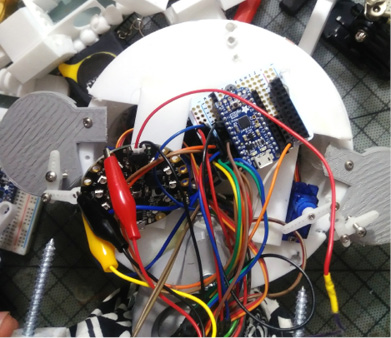
What I’m sharing with you is Dexter V4, the most upgraded version yet. I used Fusion 360, and a bit of SolidWorks, to design him. His eyes are a hacked pair of LED glasses, and I made him with the intention and ability to be upgraded and customized depending on the person making him. He’s still not perfect — I drilled my own holes to add screws, and hot-glued a lot of him — but I hope you like him