


Engineers and scientists often create wonderful, constructive devices that make life better for people who are sick and disabled. Nearly as often, they design and build weapons and implements of warfare. And once in a while, the same person does both.
Joseph Laws McKibben was an important figure in World War II’s Manhattan Project. A nuclear physicist from the University of Wisconsin, Dr. McKibben was on the team that researched the properties of the tamper, the device that controlled the speed and power of the atomic bomb’s chain reaction.
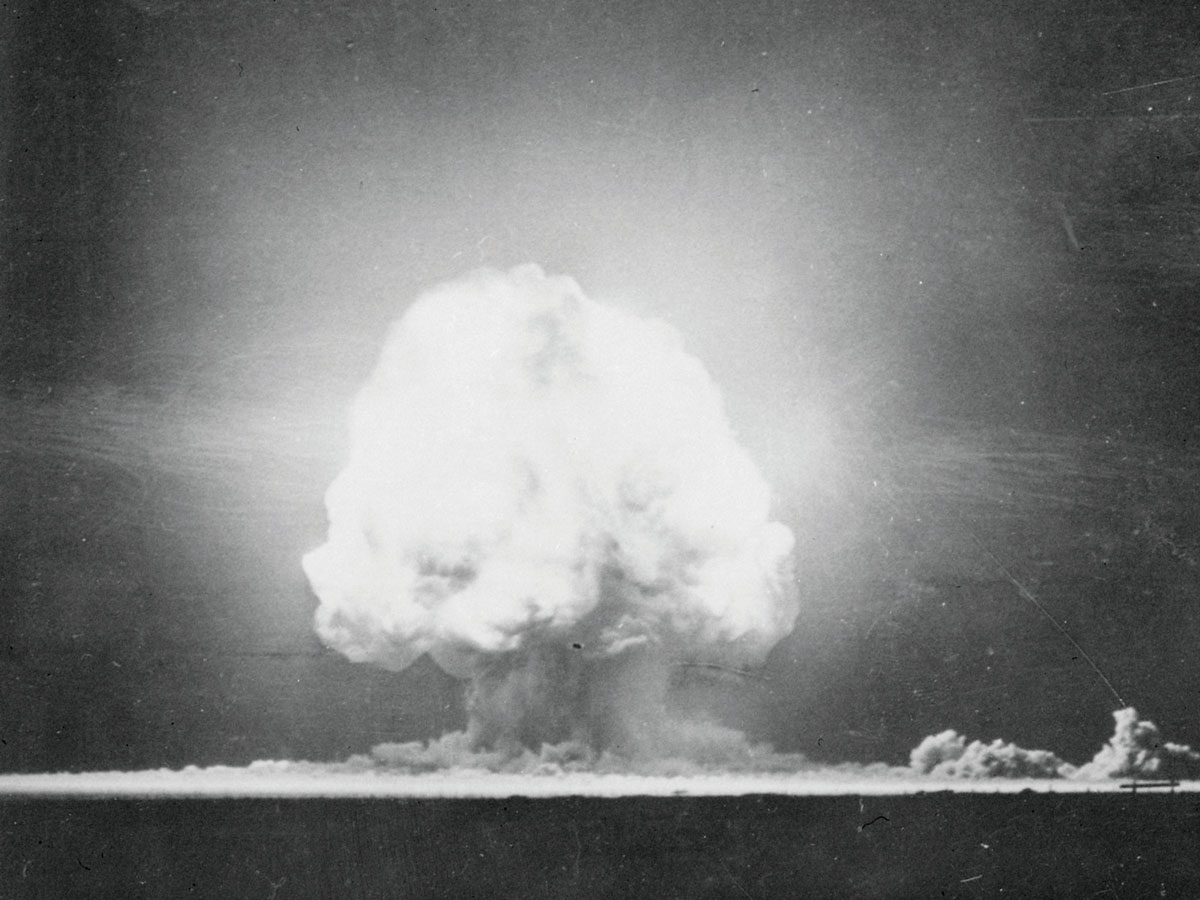
In addition to being a theoretician, McKibben was a hands-on sort of scientist. On July 16, 1945, he pushed the button that set off the first ever A-bomb — code-named Trinity — in the New Mexico desert. Early that morning, McKibben made the final electrical connections to the explosives that would initiate the chain reaction in the bomb. Then he hopped into his jeep and drove six miles to a concrete bunker where the countdown to HHour was underway. There, McKibben threw the switch to initiate the final control sequence that detonated the bomb.
Six years later, in 1952, McKibben’s daughter, Karan, was stricken with polio. Paralyzed from the neck down, she was confined to an iron lung for a time. Dr. McKibben felt that he could use his engineering skills to improve the quality of her life. So, working with the doctors at the rehabilitation center where she was living, he began researching ways to give polio patients some control over their fingers.
McKibben studied the existing hydraulic, electric, and pneumatic methods of moving paralyzed arms, and he became intrigued by one that he felt had particular promise. A few years earlier, a German scientist had prototyped a clever pneumatic gadget operated by compressed gas. The device consisted of a flexible bladder that could be filled with carbon dioxide. The bulging bladder closely simulated the natural motion of human muscles. Could this idea, McKibben wondered, allow paralyzed fingers to work once again?

Within a few years McKibben’s team developed the gadget now known as the air muscle, or braided pneumatic actuator. Dr. McKibben placed it next to his daughter’s paralyzed forearm and attached it to her thumb and first and second fingers with splints. When she operated a lever by shrugging her shoulder, gas flowed into a tube, causing a contraction that drew the paralyzed fingers together. At the next touch of the lever, the plastic tube deflated and her fingers relaxed.
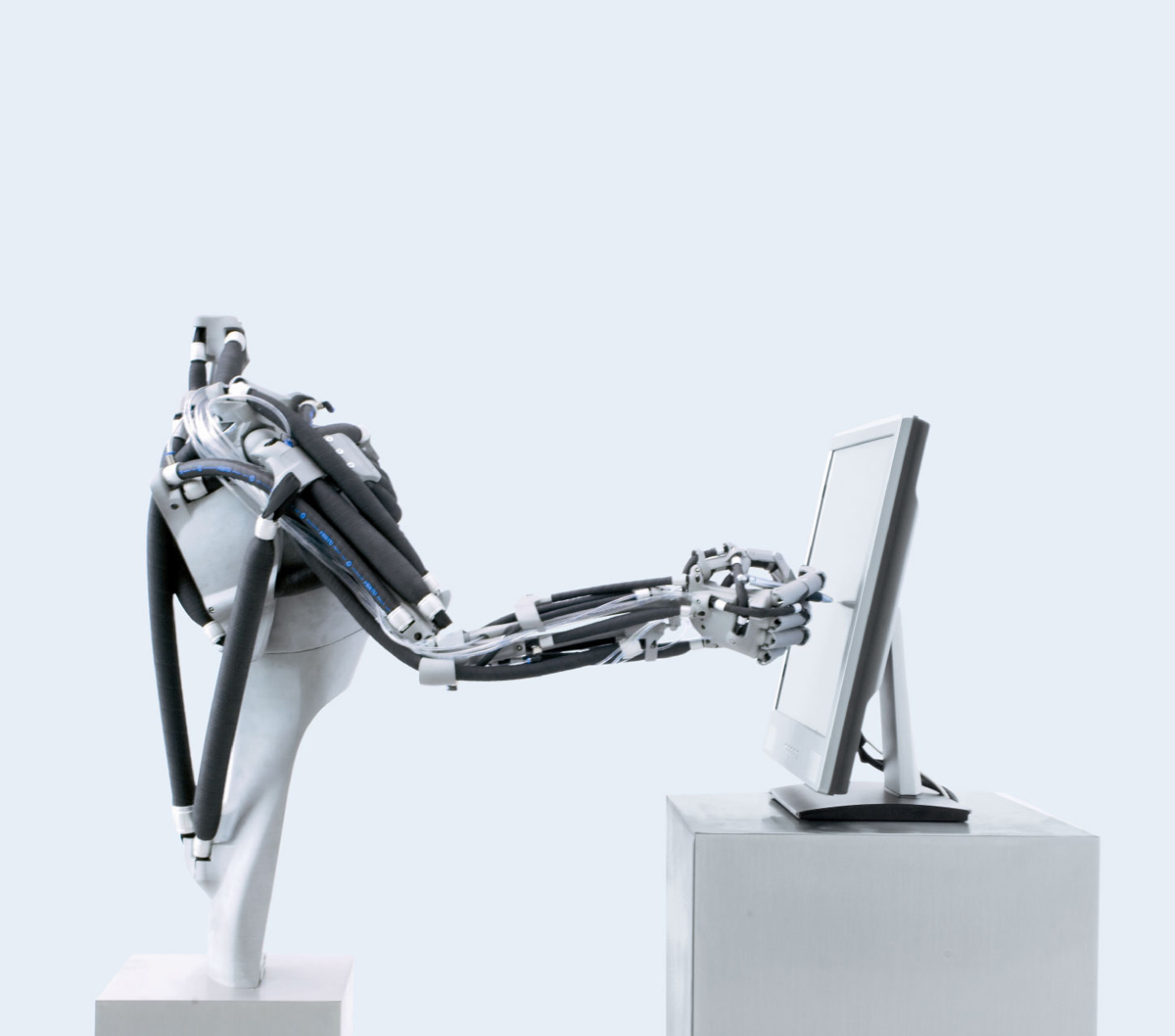
McKibben’s air muscle has become an important component used by roboticists and biomedical engineers, thanks to its high force-to-weight ratio, flexible structure, and low manufacturing costs. A typical modern air muscle consists of a flexible rubber tube or bladder inside a polymer mesh sleeve that’s braided in a helical weave. When the bladder is inflated, the mesh expands in width but simultaneously contracts in length. This shortens the muscle, so anything attached to the ends of the muscle is pulled together. The muscle contracts smoothly and with a surprising amount of pulling force.
You can easily construct an air muscle from hardware-store parts. It’s a great example of using basic pneumatic principles to make devices for controlling motion. It’s also a testament to Joe McKibben’s versatile ability to engineer solutions to different sorts of problems.















