

Not all great contraptions have to be practical. A case in point is Kit Fuderich’s autonomous Rice Krispies Loader, which combines a line-following robot with a motion-activated cereal dispenser controlled by an Arduino Due.

As a 6th grade technology teacher and 9th grade tech workshop teacher, Fuderich created his two-part system as a means to illustrate a number of concepts, such as modeling Arduino interaction using MATLAB software, 3D printing and engineering a robotic arm, and using sensors to create interactivity between two distinct systems.
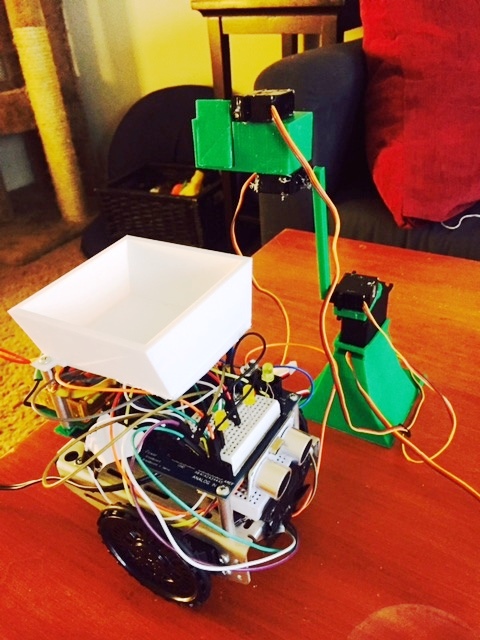
As you can see in the video, the project makes use of a homebrewed robot arm to both scoop and deliver cereal to the passing rolling robot. To time the transfer of cereal accurately, a pressure (or force resistance) sensor is placed along the path traveled by the robot at just the right location to ensure that the cereal delivery syncs up.

Fuderich’s project recently won the Teacher’s Pet Robotics Challenge award despite what I consider a major shortcoming: it never delivers tasty cereal to a human! For all its ingenuity, these freeloading robots are just co-conspirators in a plot to steal all the cereal.

Luckily, Fuderich’s line-following robot (aka the Line Follower 2 Extreme Bot) is an advanced project in its own right. I suspect that with a little tinkering, Fuderich can get this little guy to deliver its crunchy, delicious cargo to a nearby human, or at least stop long enough to serve as the most over-engineered cereal bowl ever created.
ADVERTISEMENT


