

![]()


If you’re reading about artificial intelligence (AI), deep learning, and neural networks, but not quite getting it, you’re not alone. It’s all so high-powered and supercomputer-y, it seems beyond the scope of our ordinary desktop computing experience, let alone the little embedded computers that makers like to build into their smart gadgets.
But Nvidia has set out to change that by providing massive computational power on a small, low-power development board that’s ripe for makers to experiment with — the Jetson TX1. Based on Nvidia’s popular GPUs made for high-speed video graphics, the Jetson boards are focused on visual computing, Nvidia’s term for everything they do. What that means for makers is the ability to capture and analyze hundreds of images per second — for applications like face recognition and security; autonomous navigation of cars and drones; 3D mapping; advanced robotic behaviors; and projects no one has yet dreamed of.
For more information on the Nvidia Jetson TX1 Developer Kit, please visit this site.
Get student discounts on Nvidia Jetson here.




Nvidia wants to see what kind of projects makers will dream up to take advantage of this mini supercomputer, so they’ve provided Make: with the Jetson TX1 Developer Kit and challenged us to explore what it can do.
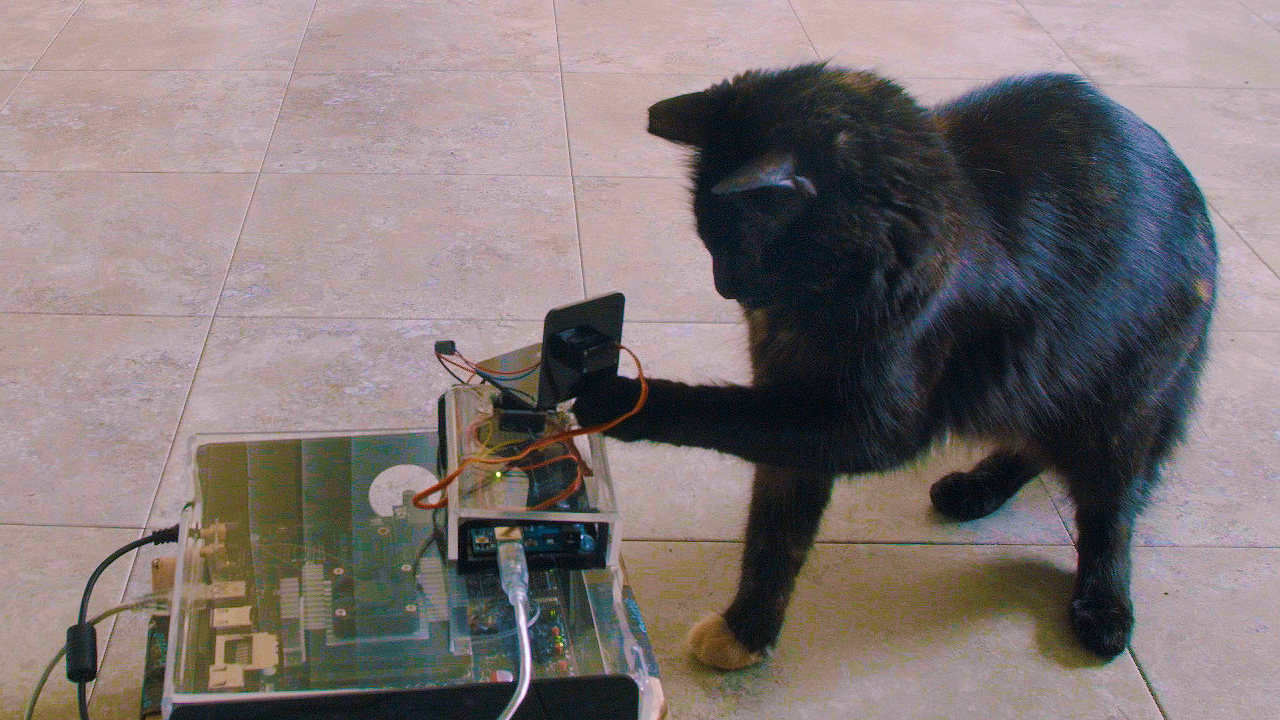
Our first project, by Sam Brown, shows off the Jetson’s ultrafast image processing and “neural network” learning abilities: It’s a cat-teasing laser pointer that actually recognizes cats and only activates when a cat is present — not a person, only a cat! This Cat Spotter truly understands what cats look like, thanks to the Jetson’s huge computing power, neural network software, and a massive library of images we’ve used to train the neural network. It’s like training a student with flash cards (“CAT” or “NOT CAT’) except the Jetson can learn thousands of flash cards in minutes. Once trained, the Jetson can correctly recognize an image from its built-in camera in milliseconds — thousands of times faster than ordinary computers.
Based on Nvidia’s popular GPUs made for high-speed video graphics, the Jetson TX1 is the second generation of their boards aimed at makers and other development projects. It’s capable of massive, multitasking computation and deep learning, and it’s what enables this project to identify whether a cat is present, before activating the laser.
Follow the instructions below to build your own Jetson TX1 Cat Spotter. And tell us — what else would you like to see us build? Let us know how you’d use the Jetson TX1 in your projects in the comments below!
—Keith Hammond, Projects Editor
BUILD A CAT-SPOTTING LASER TEASER WITH JETSON TX1
Project by Sam Brown
To jump-start you into this project, we’ve prepared a complete software install on the Jetson, with the Cat Spotter running from the moment it turns on.
The software that updates the Jetson only runs on Ubuntu Linux, so we’ll start by making a flash drive that lets any computer boot up as an Ubuntu computer. We used the utility UNetbootin to make this bootable USB stick for us.
We’ll also need the hard drive image that we’re going to clone onto a second flash drive. (Download here.)
Both of these downloads: Ubuntu for UNetbootin and the Jetson drive image, are many gigs large, and will take a while to download. Let’s construct the Arduino laser controller while we wait.