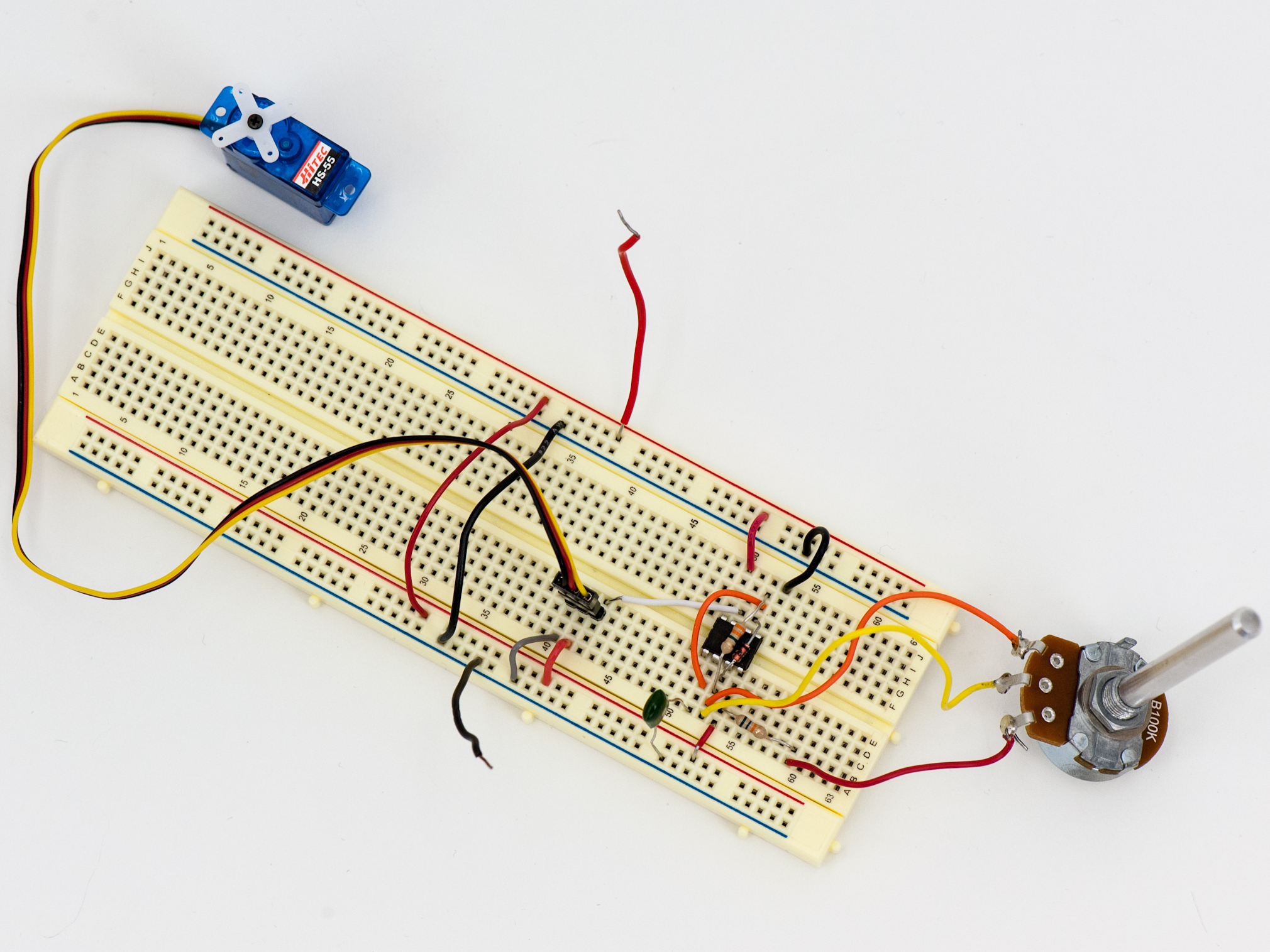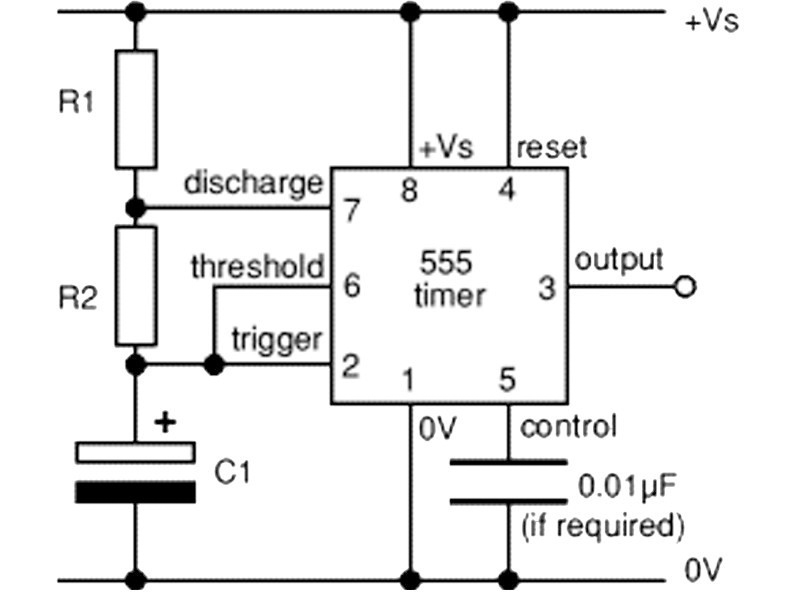
With an estimated one billion 555 timers manufactured annually, you know this component must be versatile! We’re going to learn how to build and control drivers for three very different types of motors using a breadboard, resistors, diodes, transistors, and some 555 timers (along with a sprinkling of CMOS logic). These motor drivers are the basis of many robotics and other motor-control applications.
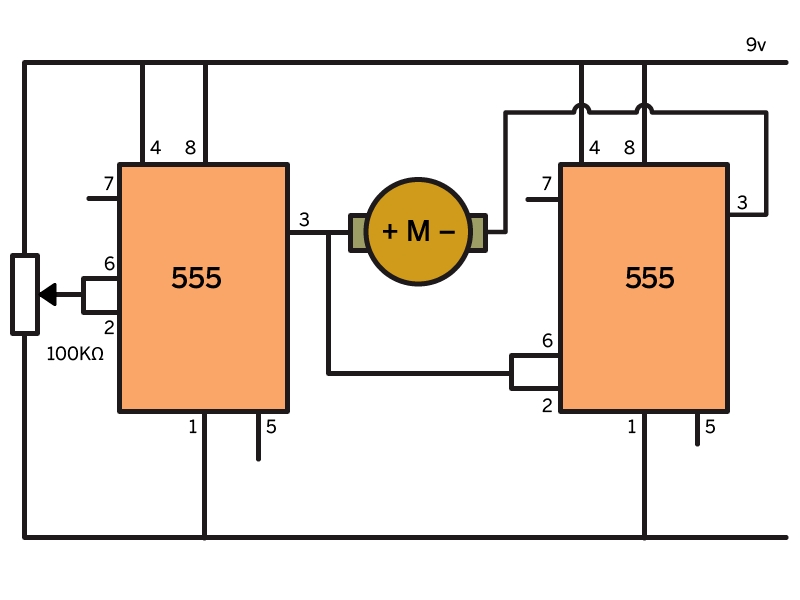
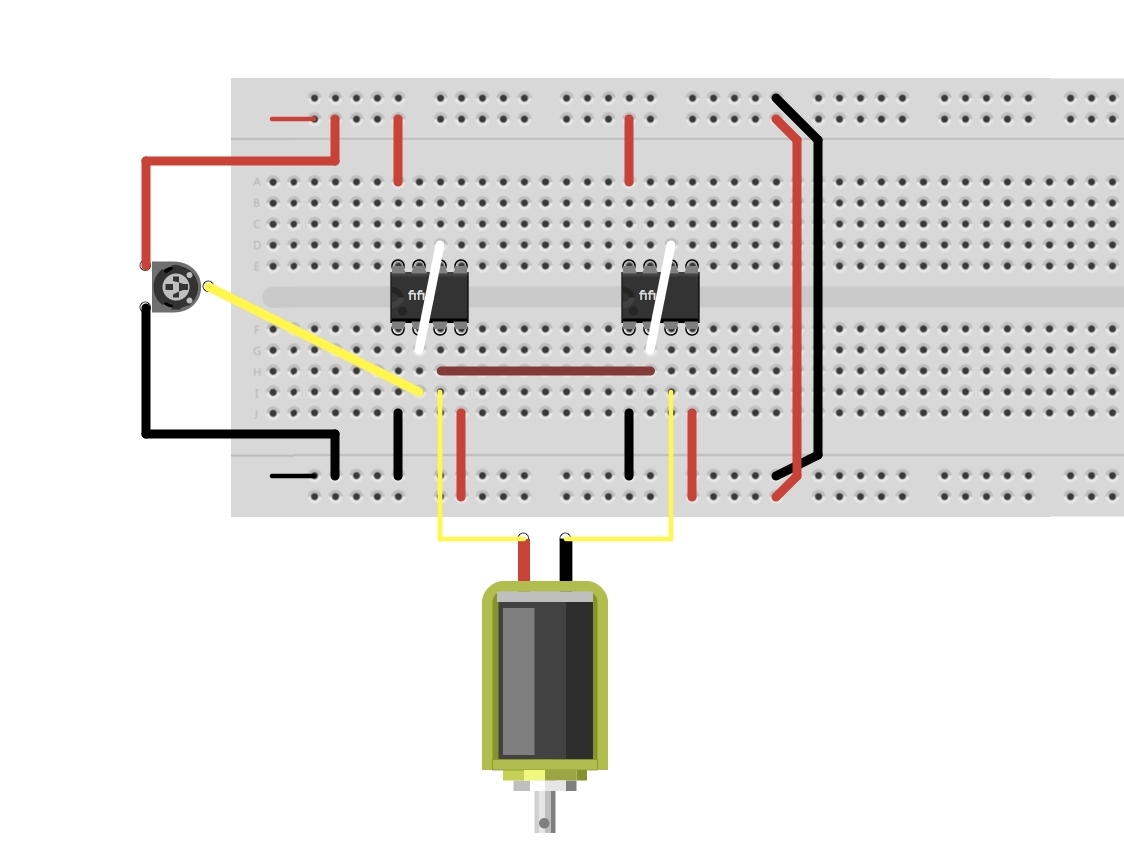
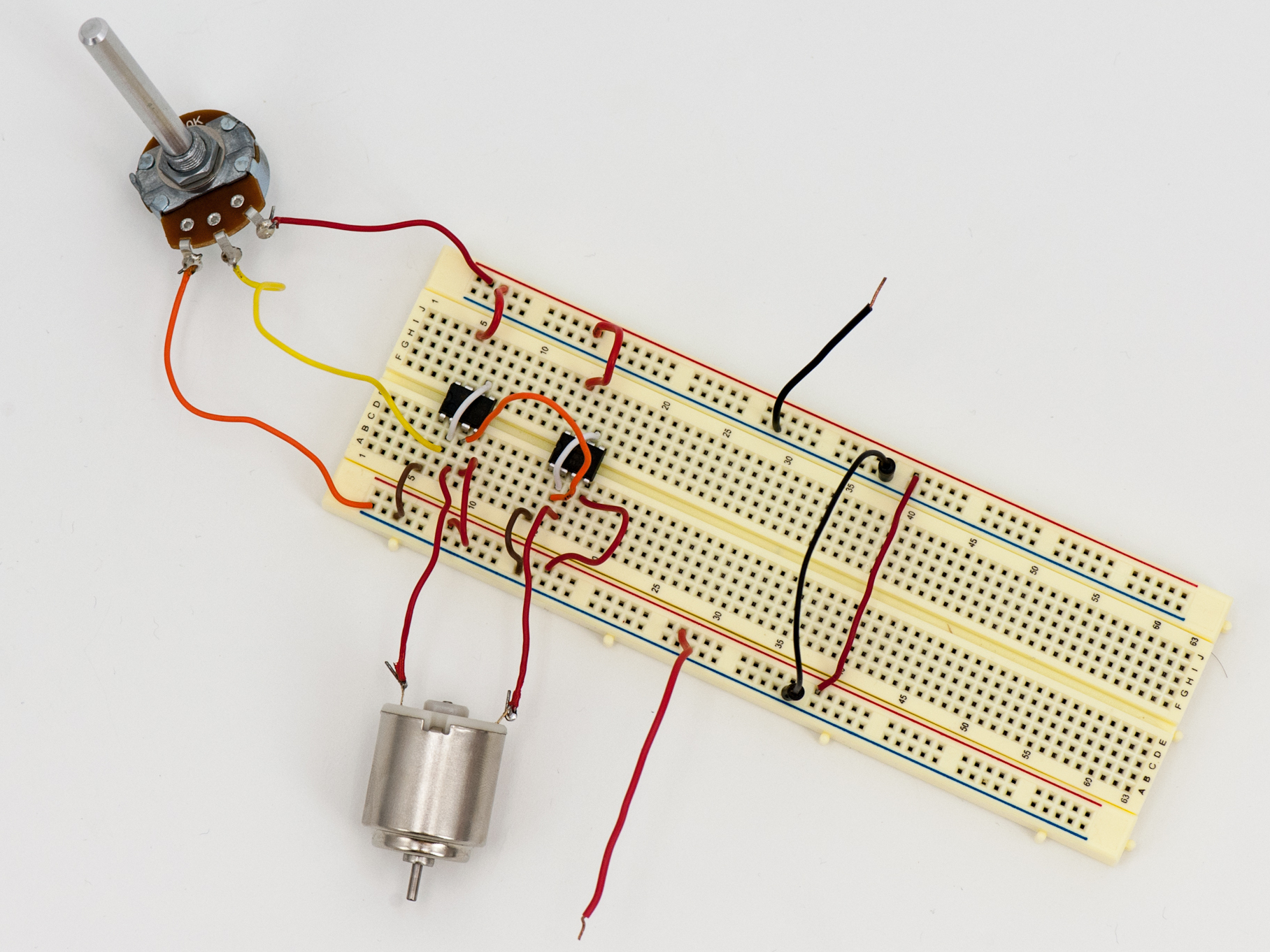
The first project is one of the simplest “H-bridge” circuit designs around. It consists of only two 555 timers, a potentiometer, and some hookup wire on your breadboard.
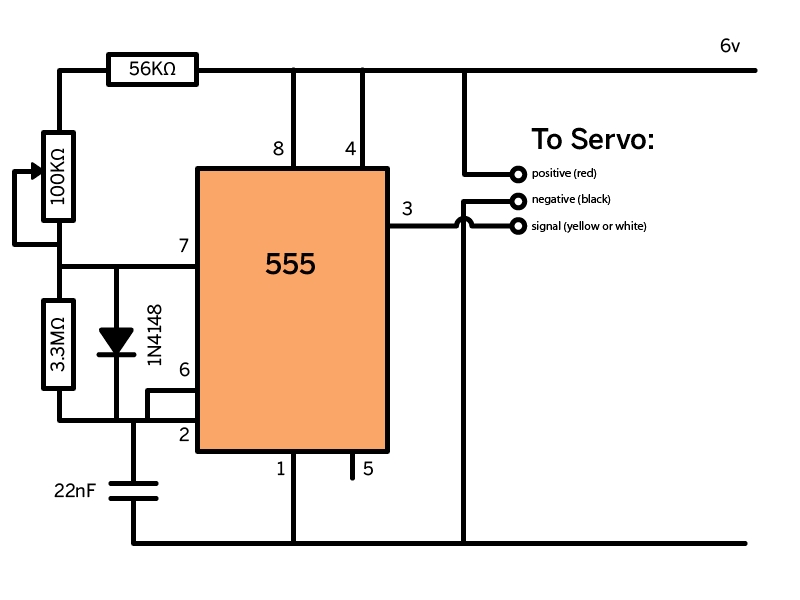
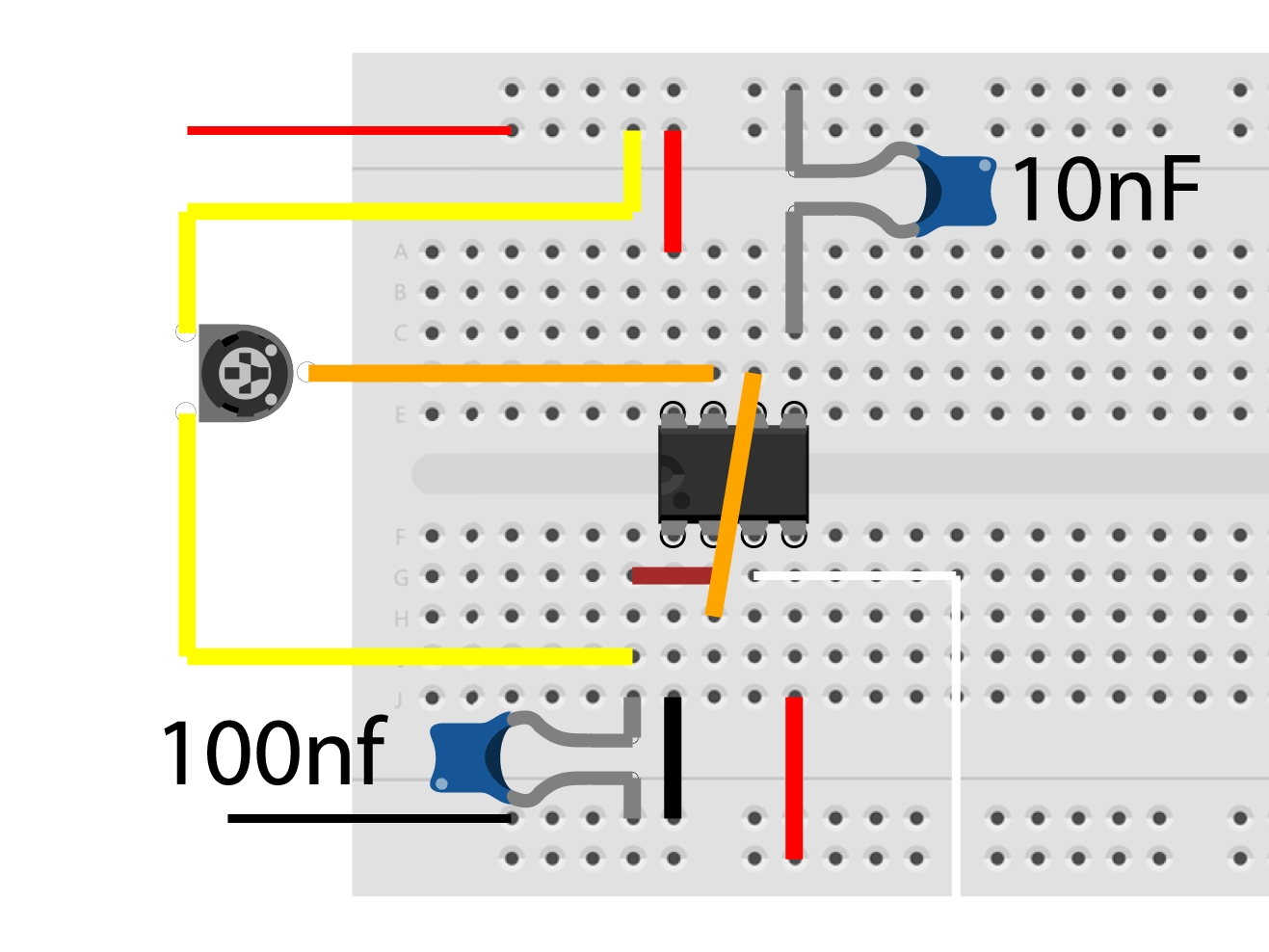
In the second project, we will build a servomotor controller using only one 555 chip and a small assortment of other parts. Servos often act as the “muscle” of a robot.
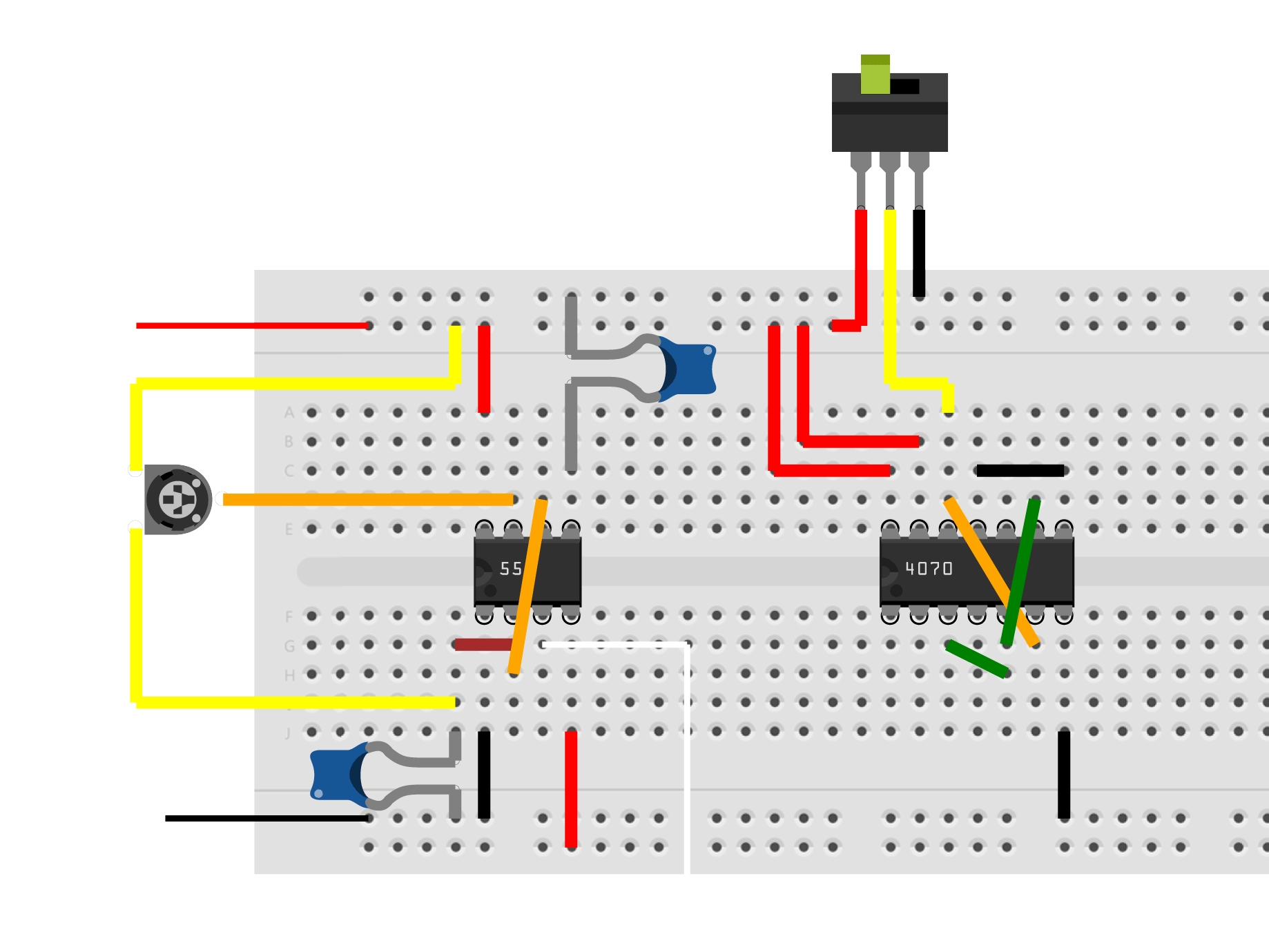
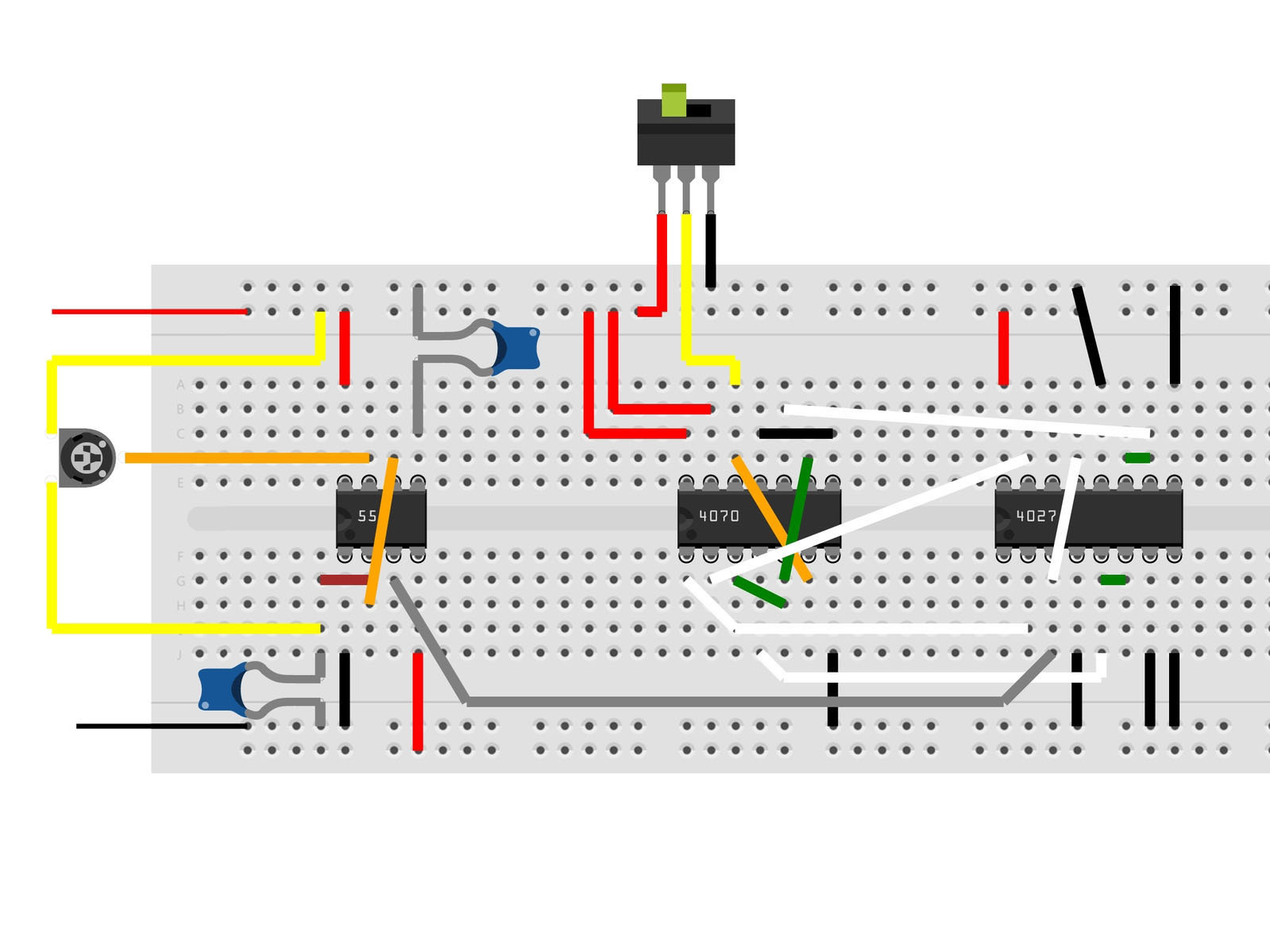
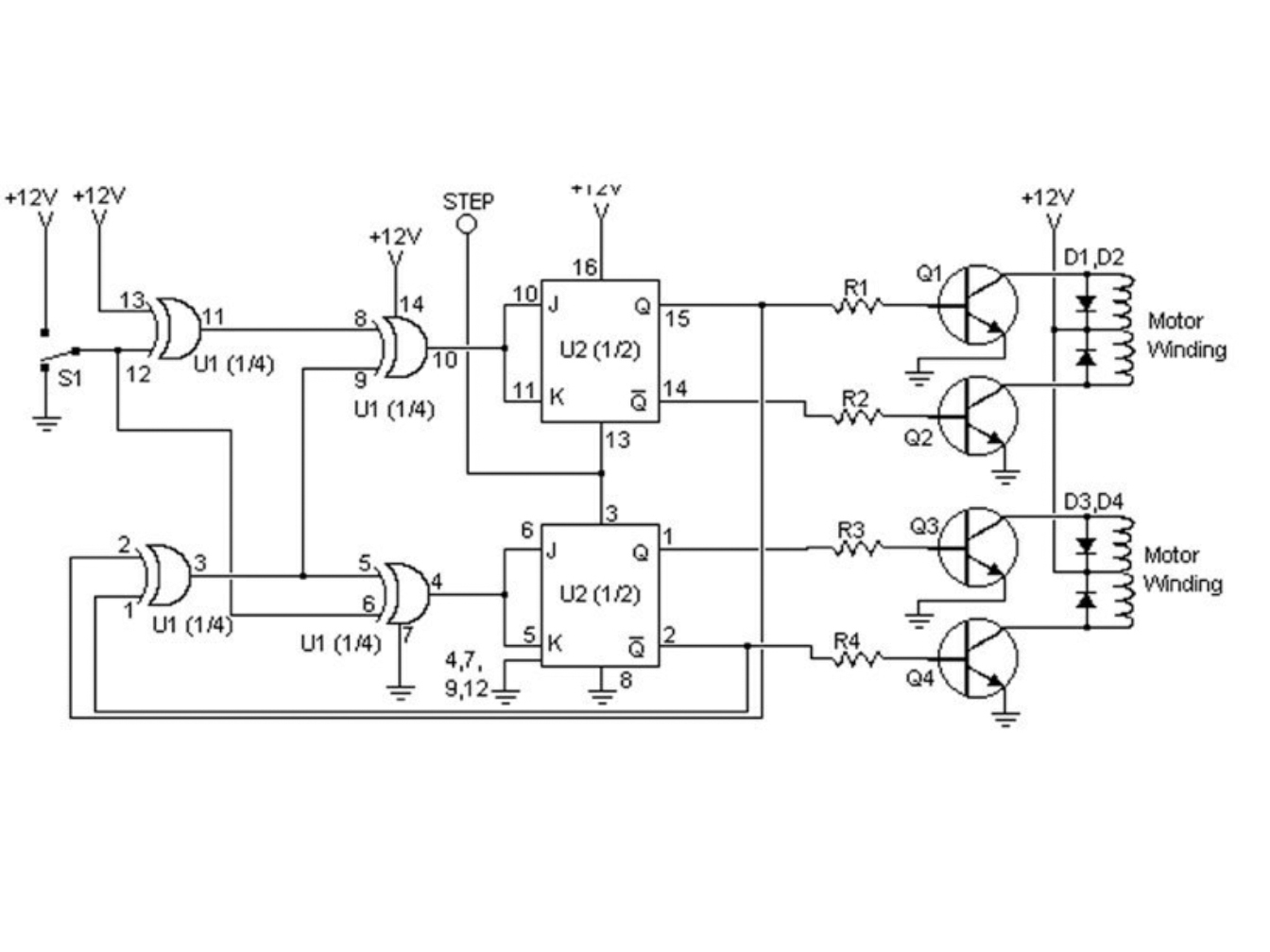
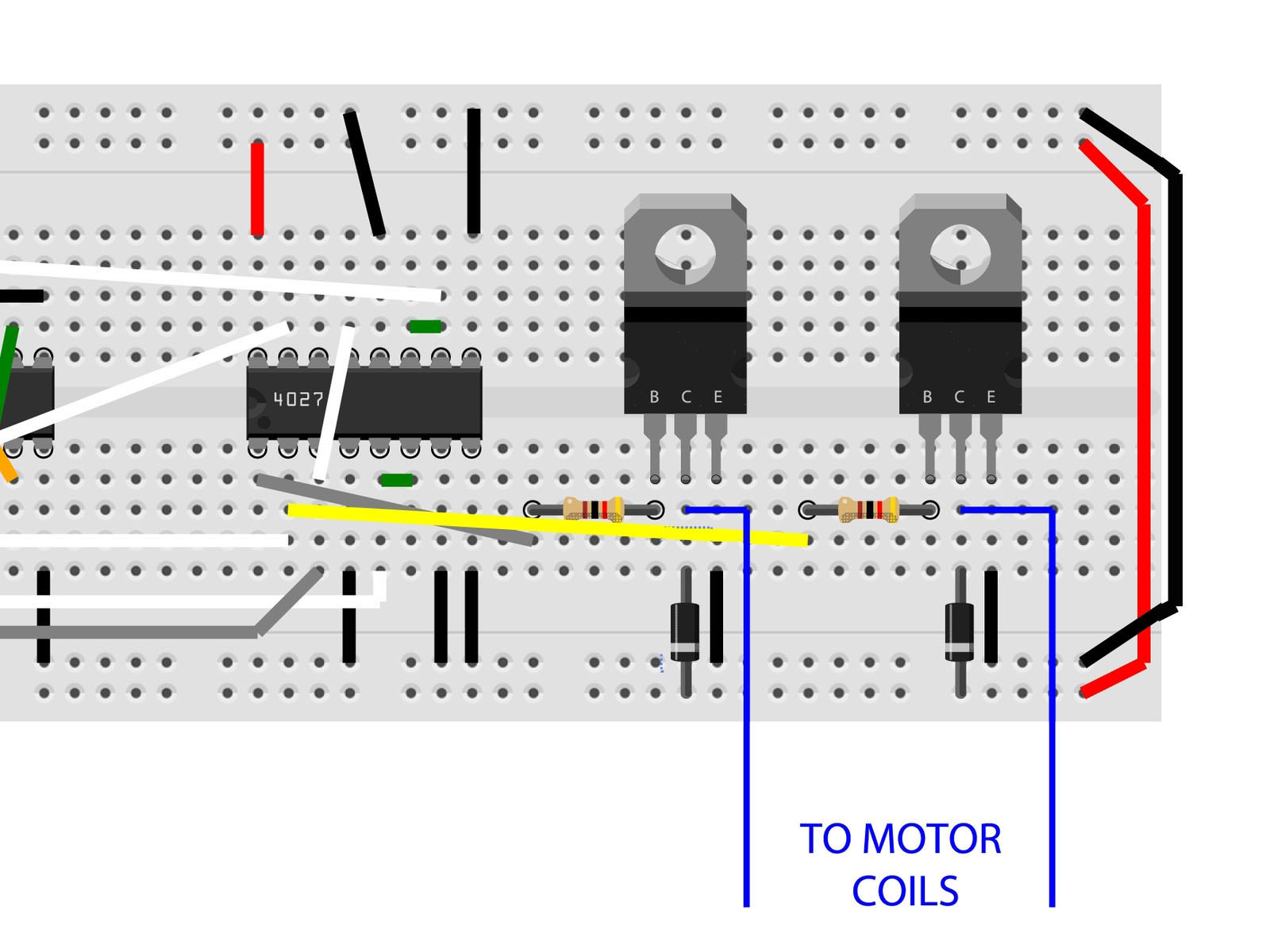
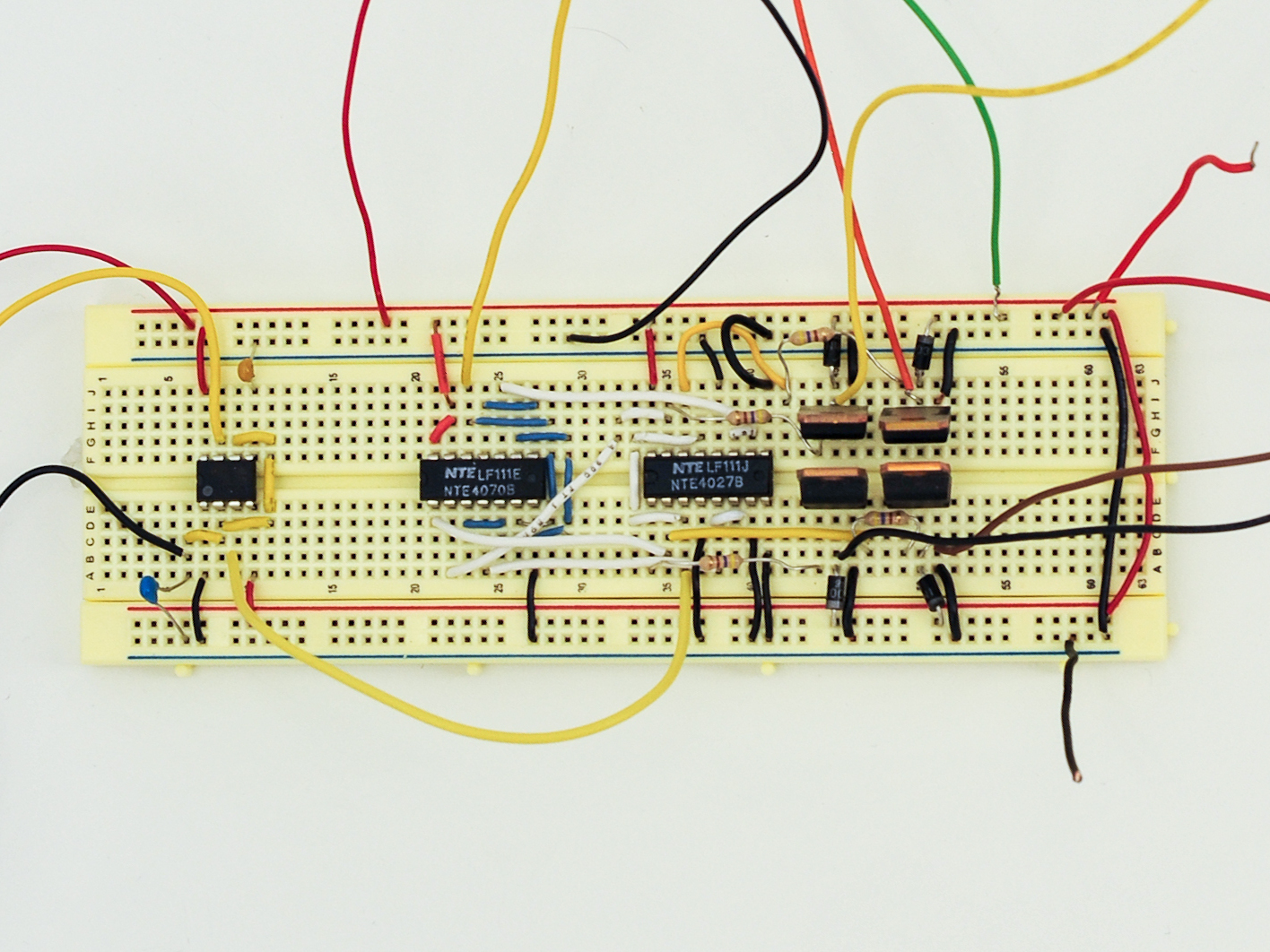
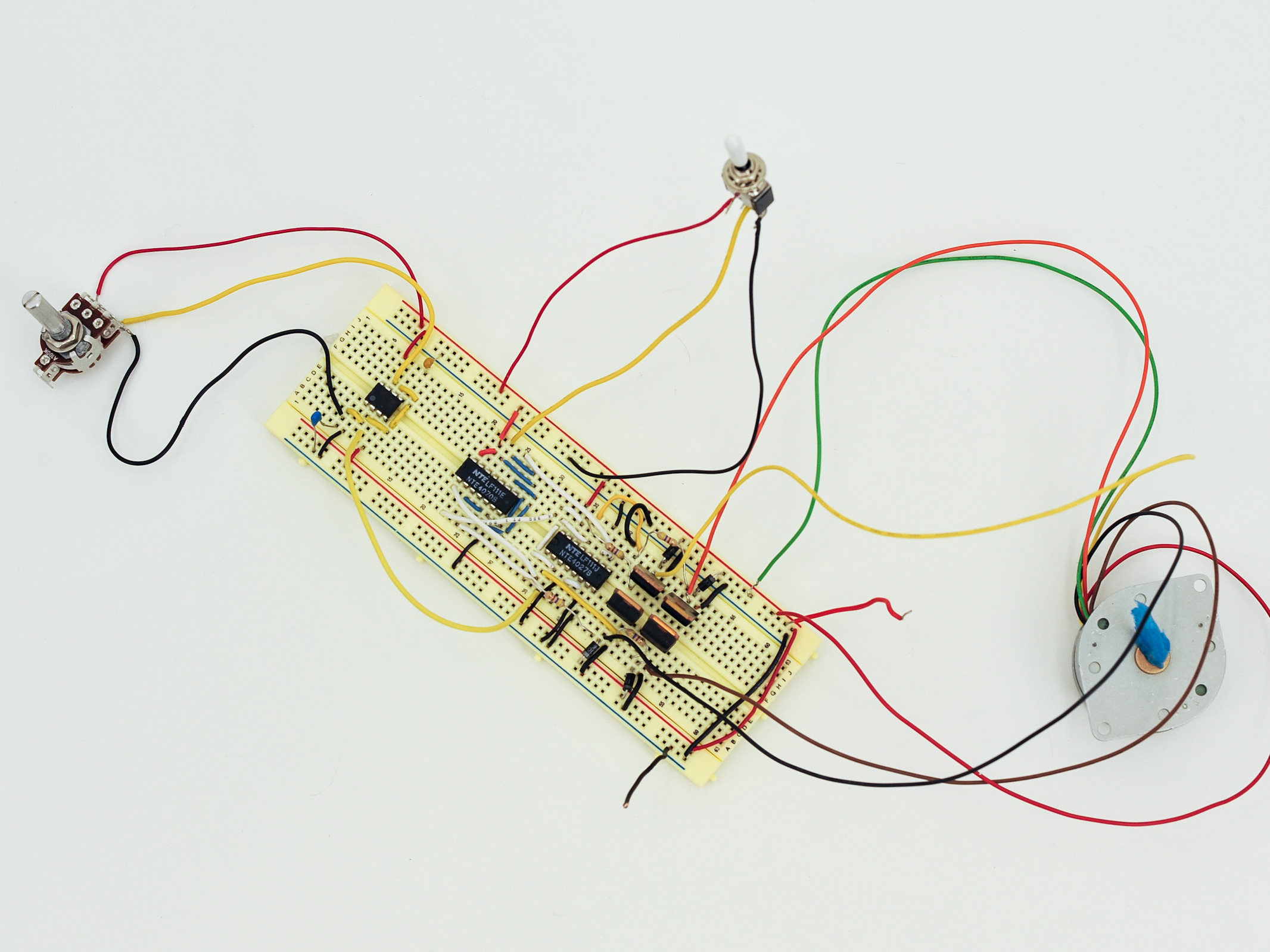
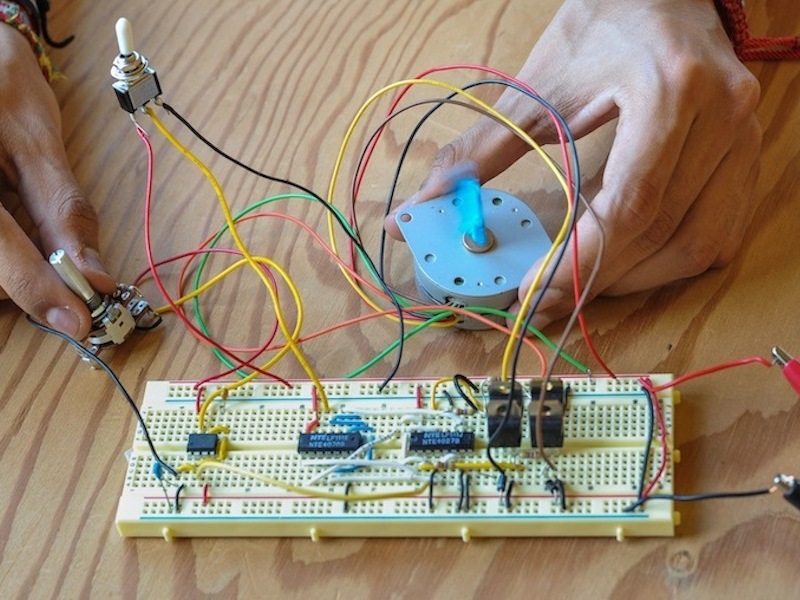
And finally, for the the third project, explained over three steps, we will build a simple stepper controller. This project will introduce you to the XOR logic gate (pronounced “Eks-Or”). Regarded as exclusive or, the output is true only if gate one or gate two are true; if both gates are true or both gates are false, the output is false.