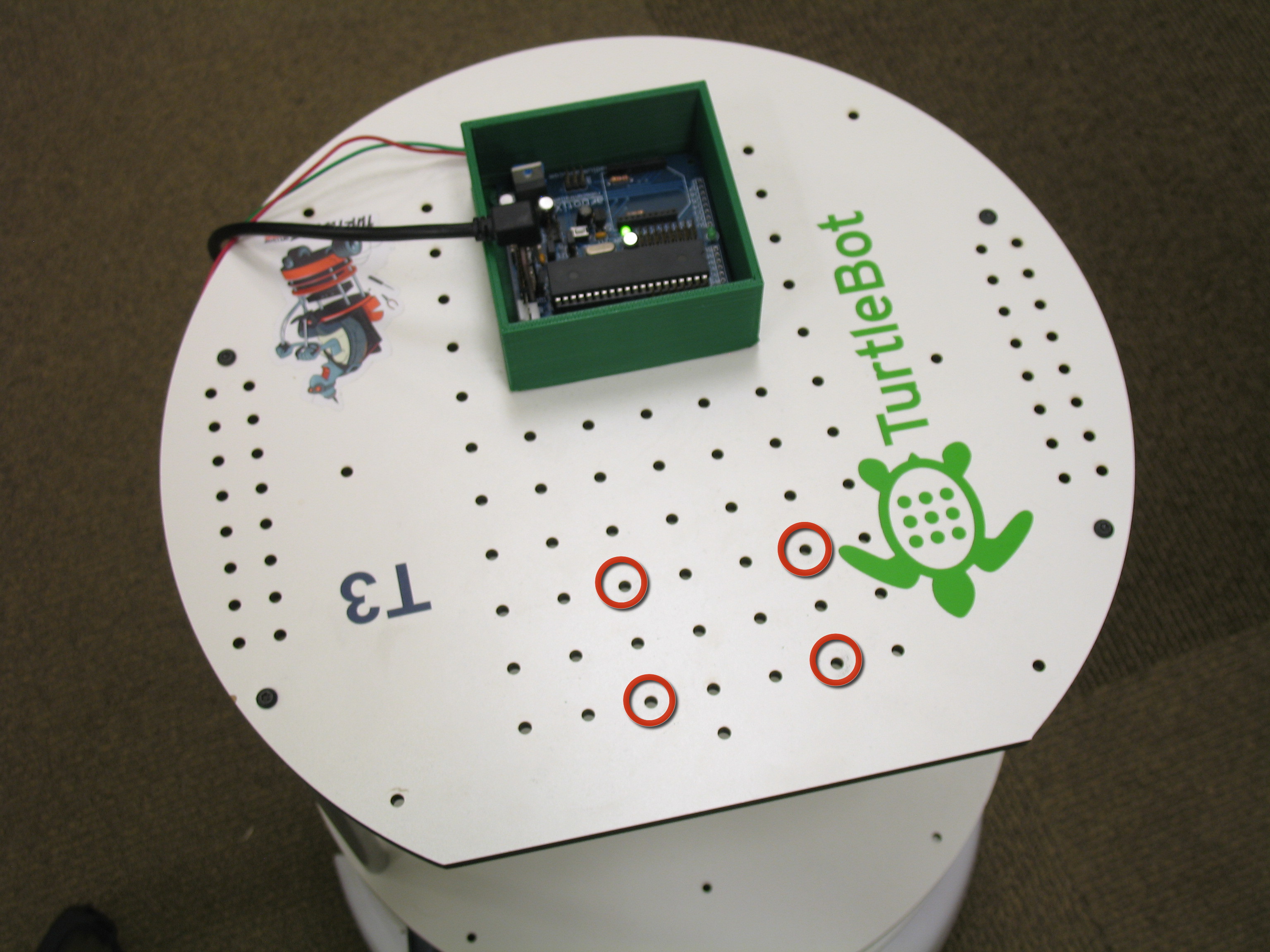
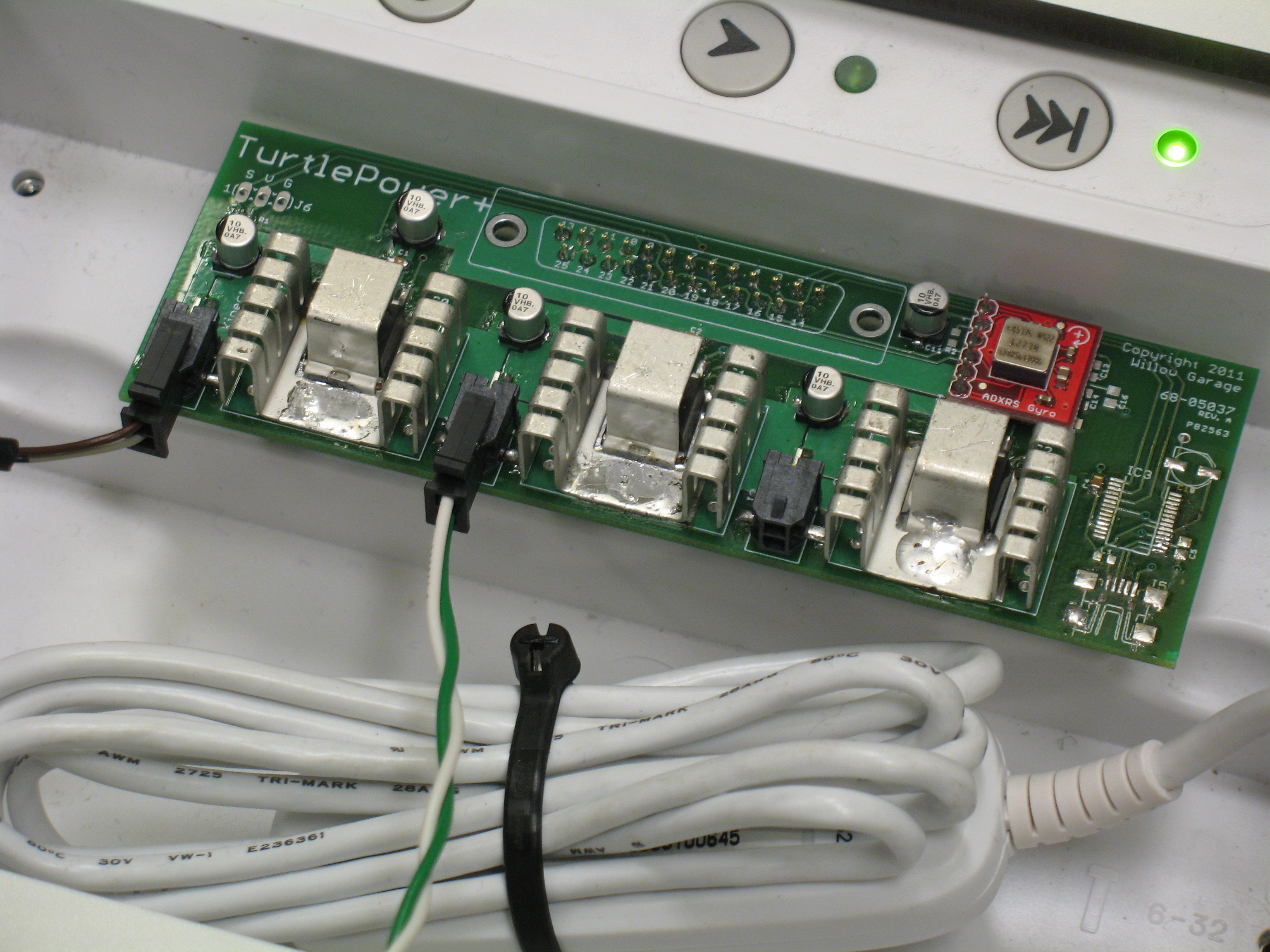
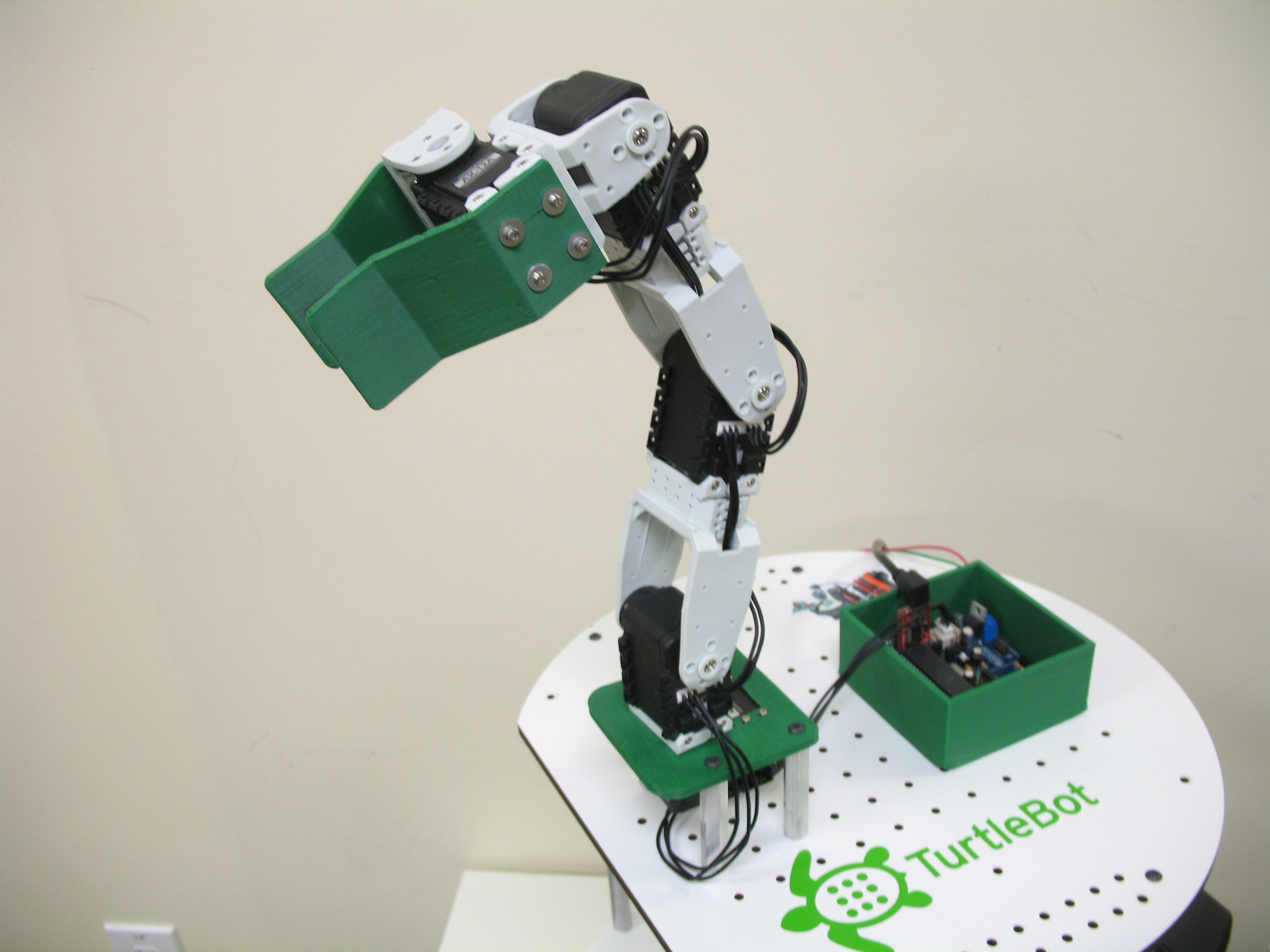
The TurtleBot mobile robot is designed for both academic and hobbyist researchers. The open-source hardware design provides excellent documentation for adding modifications and extending the capabilities of the robot in hardware or software. The robot is available for purchase as a kit or, if your research budget is limited, this guide will help you extend your TurtleBot by adding an arm.
Projects from Make: Magazine
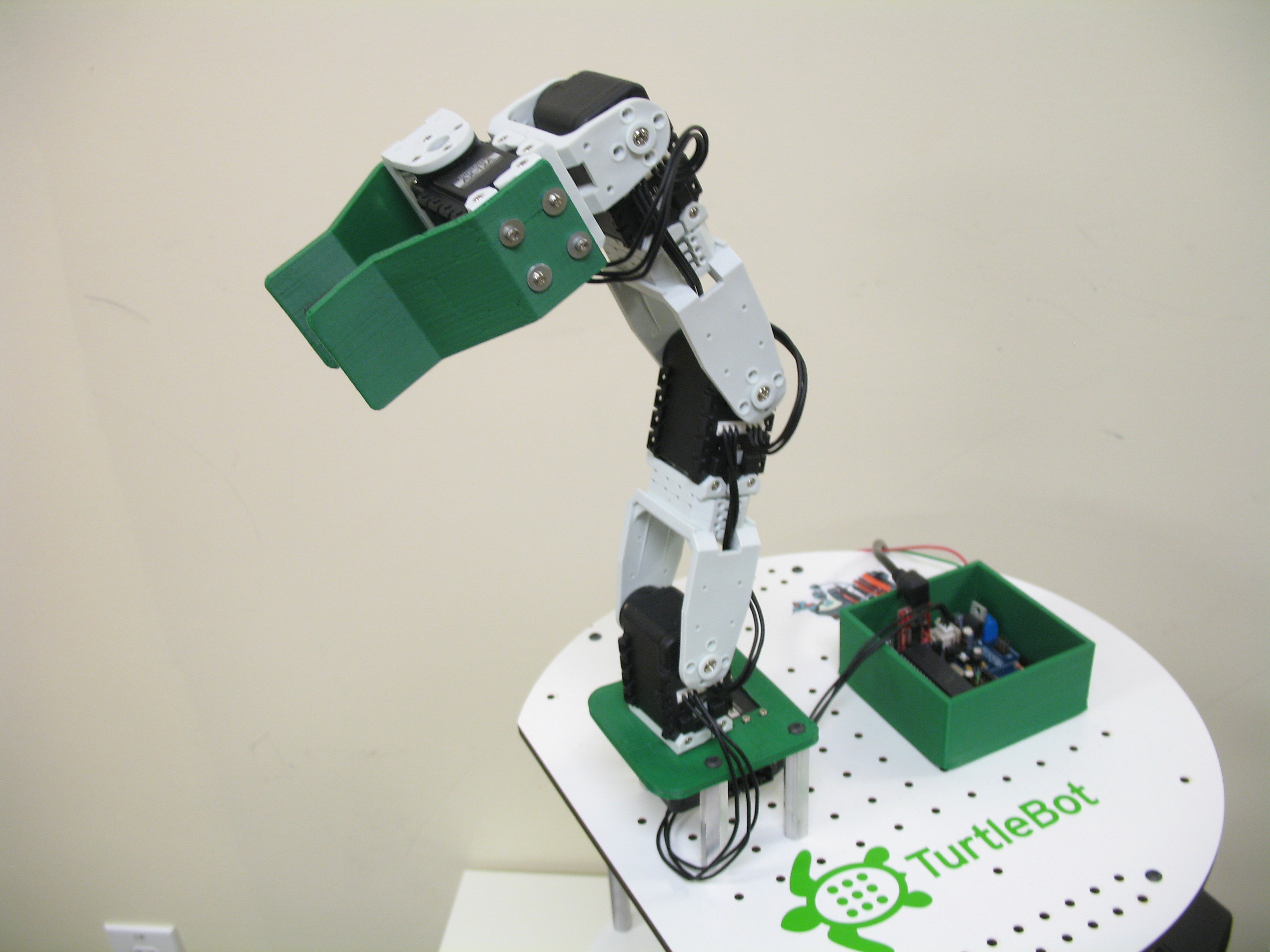
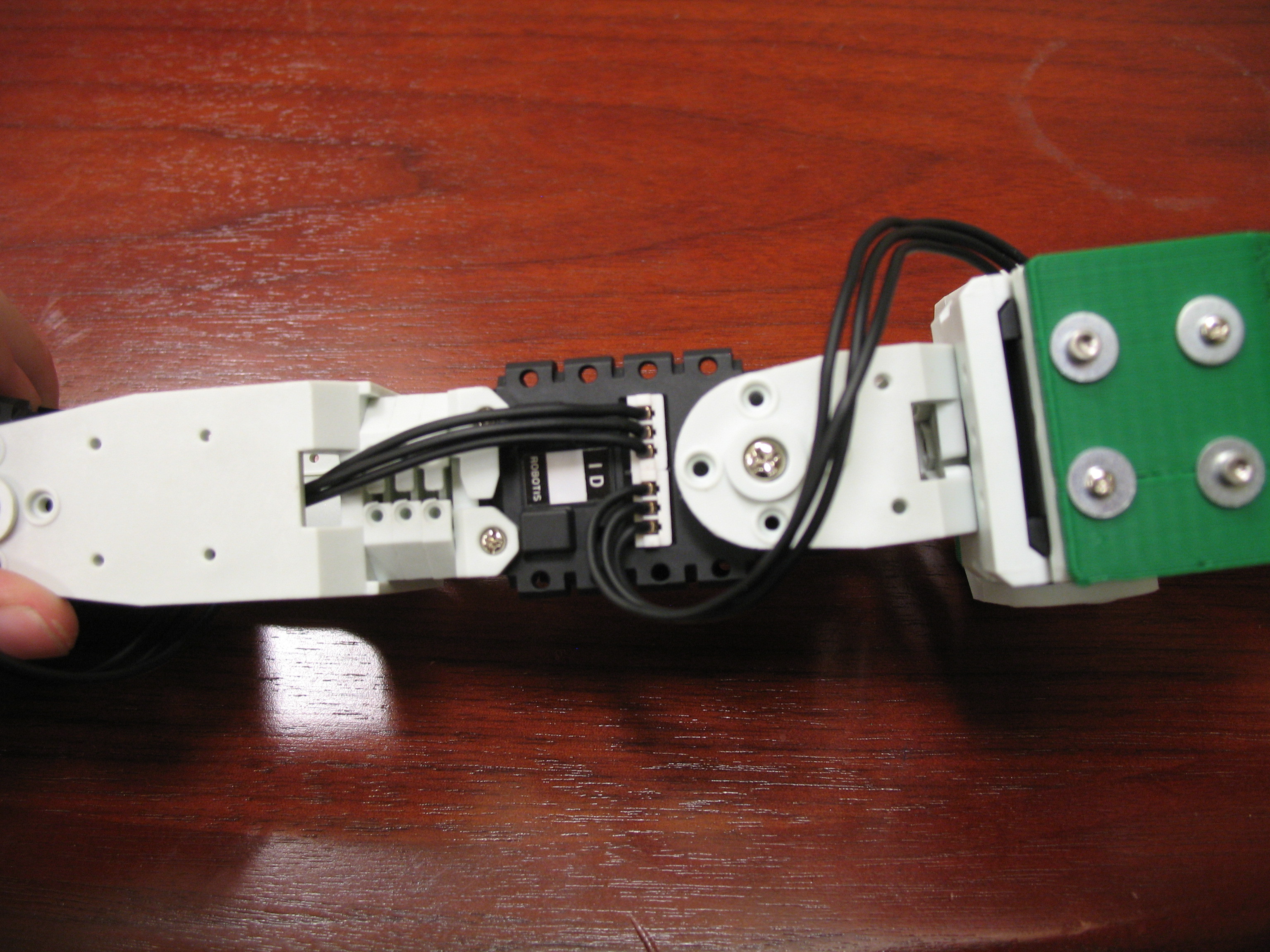
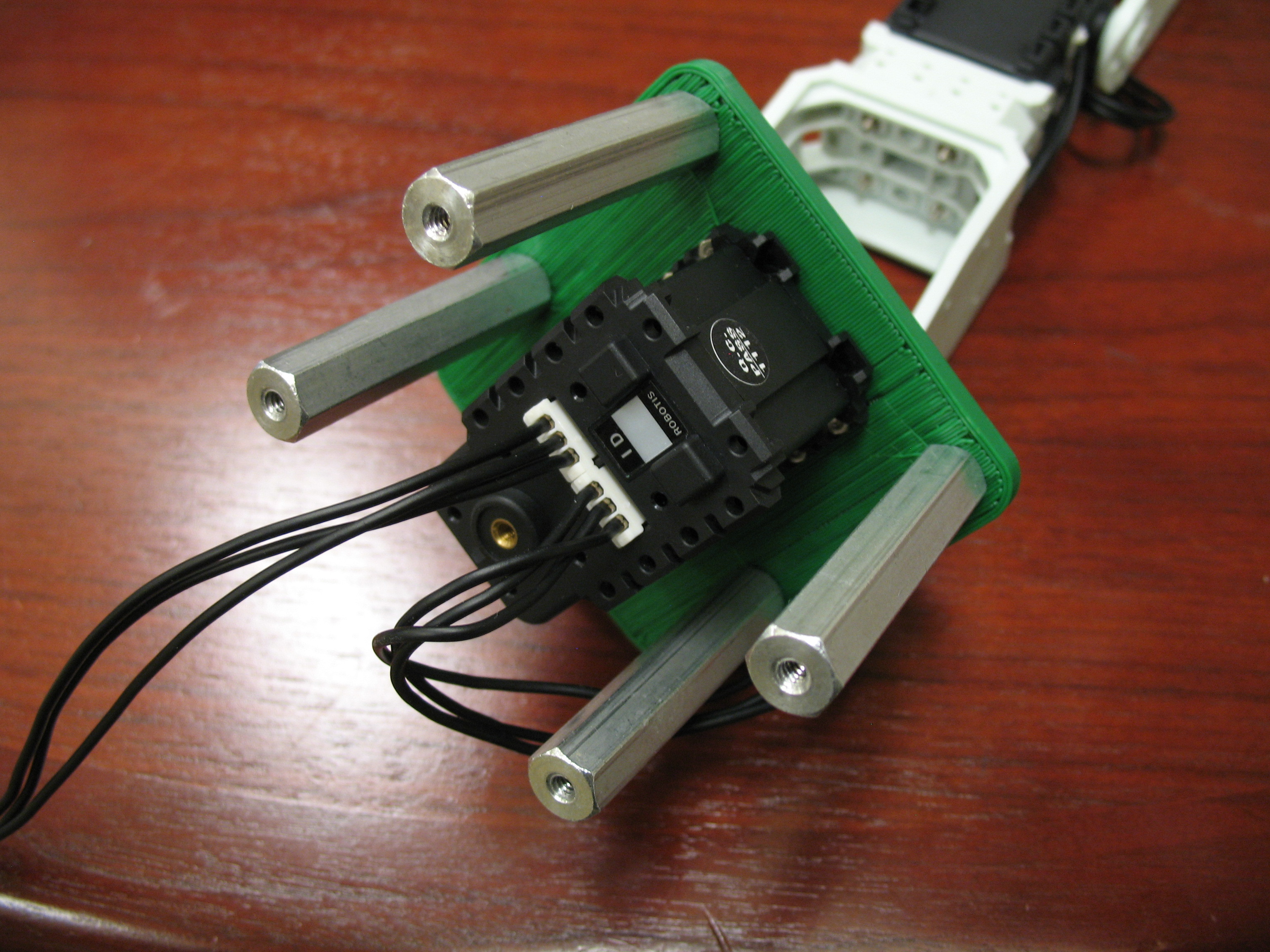
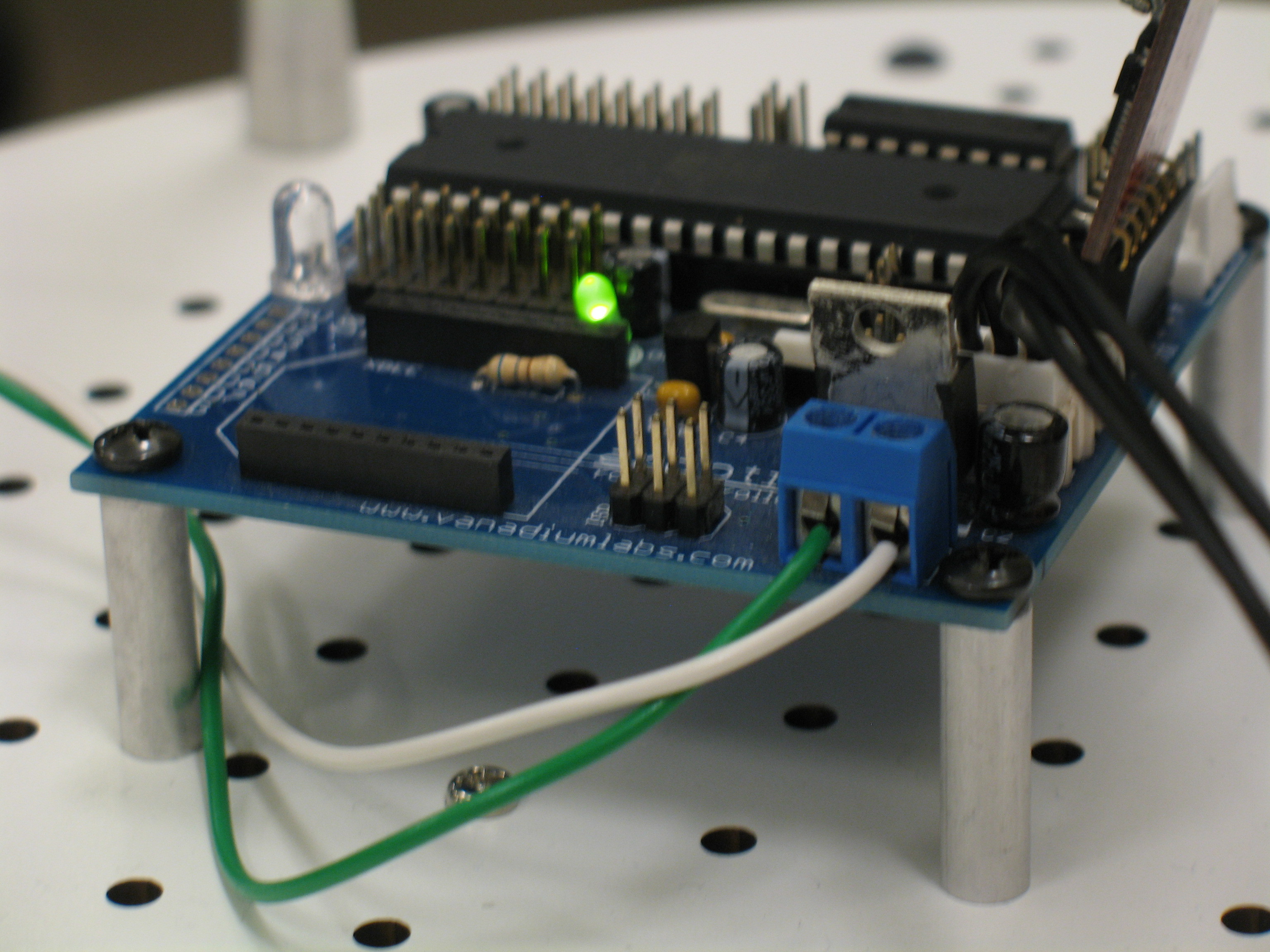
Wiring and Attaching an Arm to Your TurtleBot
This tutorial takes you step by step through wiring and attaching an arm for your TurtleBot.