We live in a house with a very tight garage, and our relatively big car leaves a tiny space in front. I designed and built this simple project to visually guide the driver into the optimal parking distance, using real-time feedback about how close the car is to the wall in front. In short, it tells you when to stop.

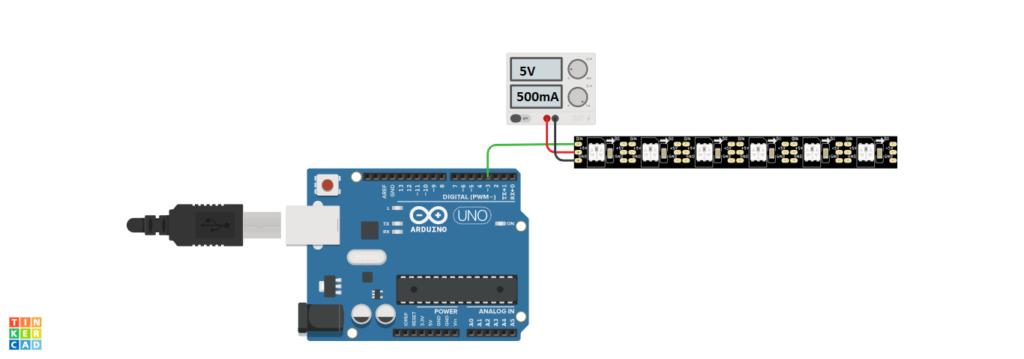
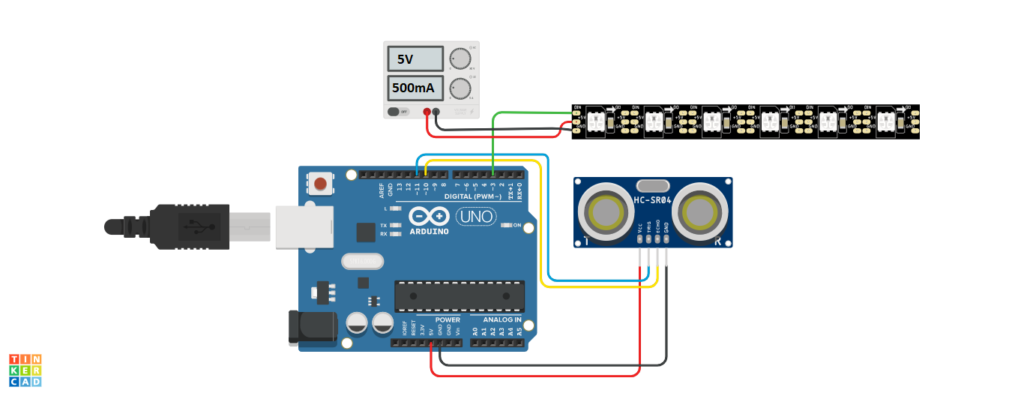
The project uses an ultrasonic sensor and Arduino to measure distance and then displays it on a full-color LED strip as a progress bar. The sensor is mounted on the wall; as the distance between the car and wall shrinks, the light strip shows an increasing number of illuminated LEDs, which also change color from green to amber to red, and then finally, flashing red.
This quick build will help anyone safely pull their car into the garage without worrying about hitting the wall or damaging the car. It is easy to assemble, and it’s a fun project for learning how how to work with LED strips and how to use ultrasonic sensors to measure distances.
Written and photographed by Krish Gupta