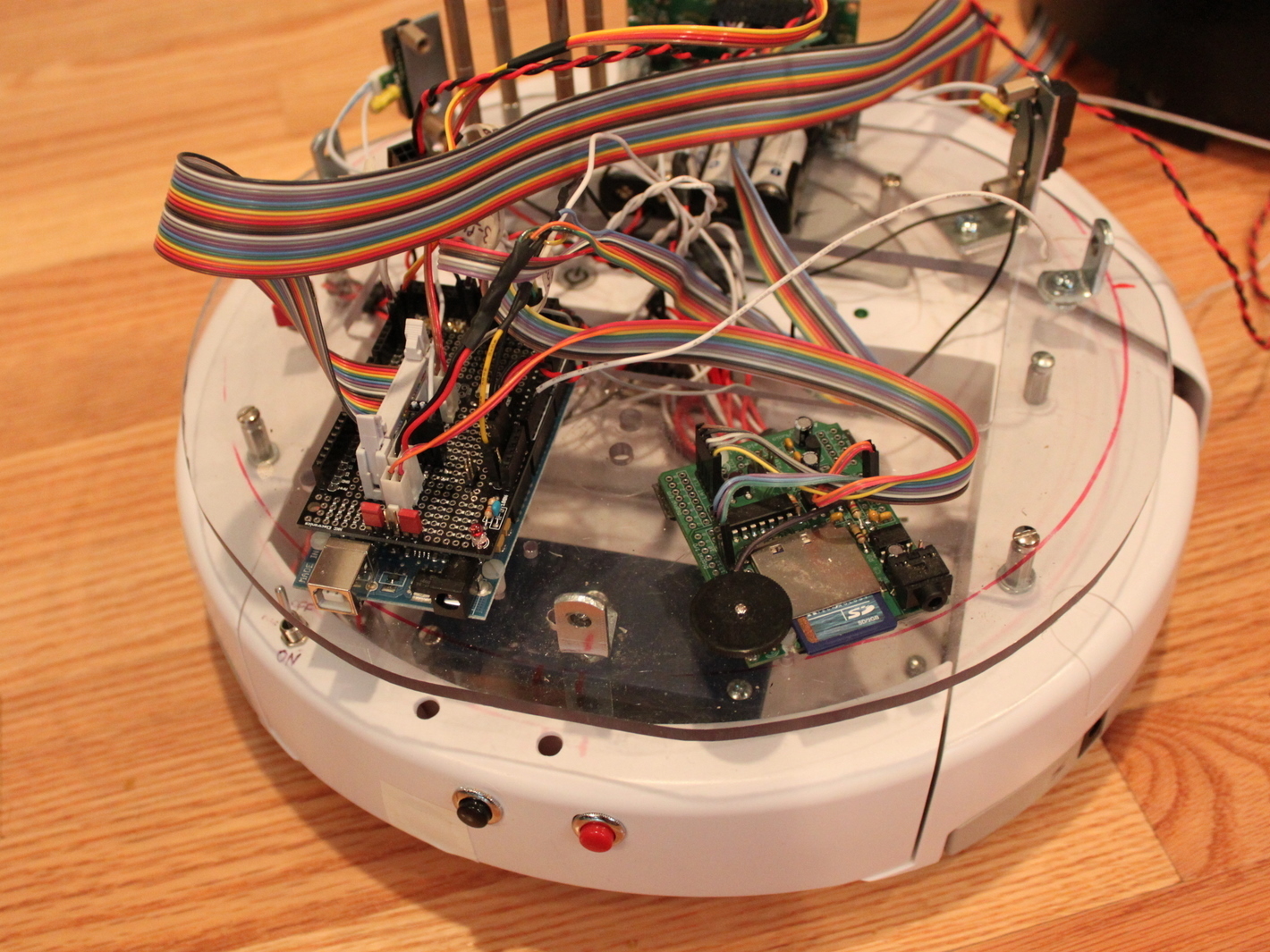
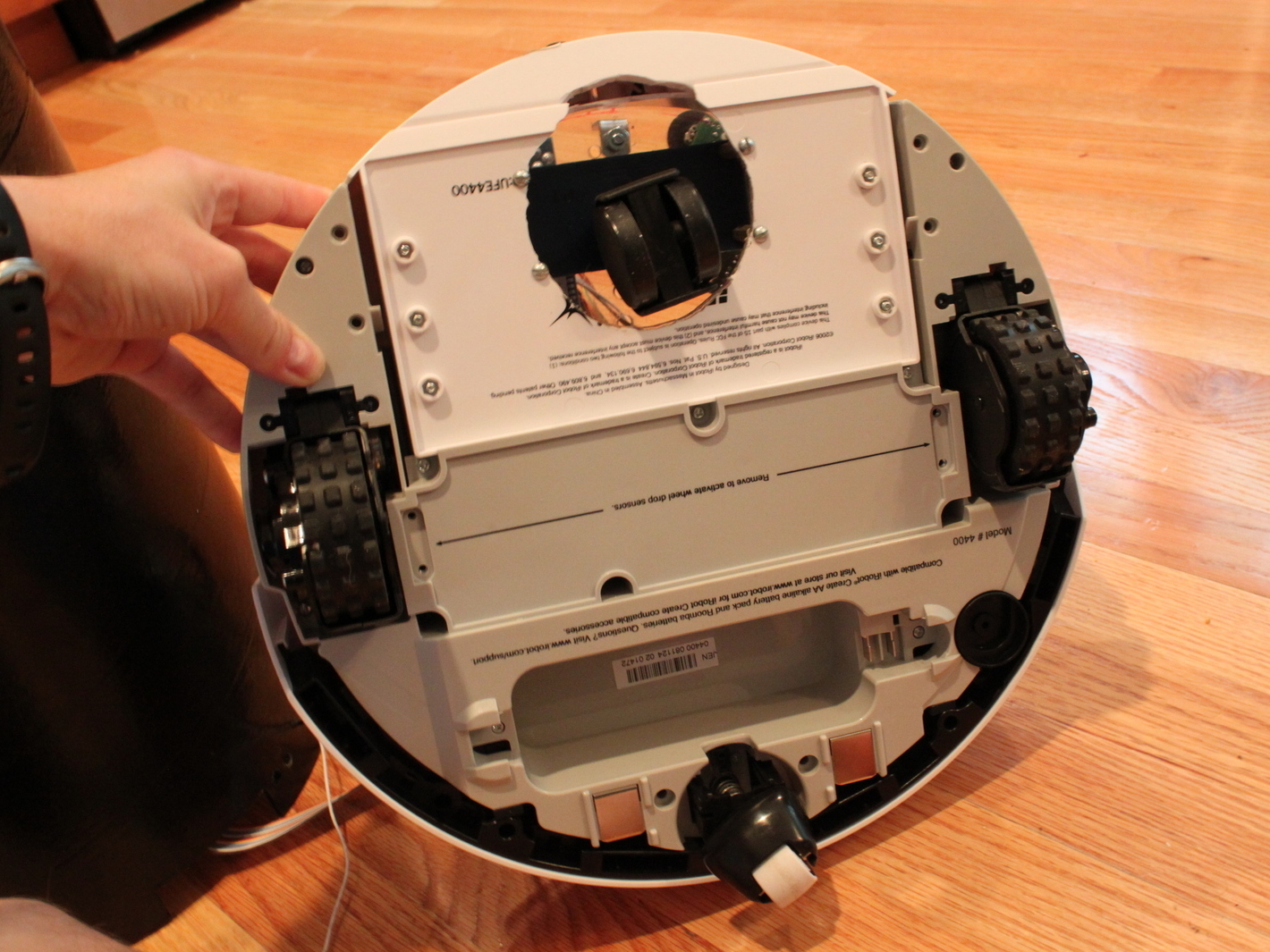
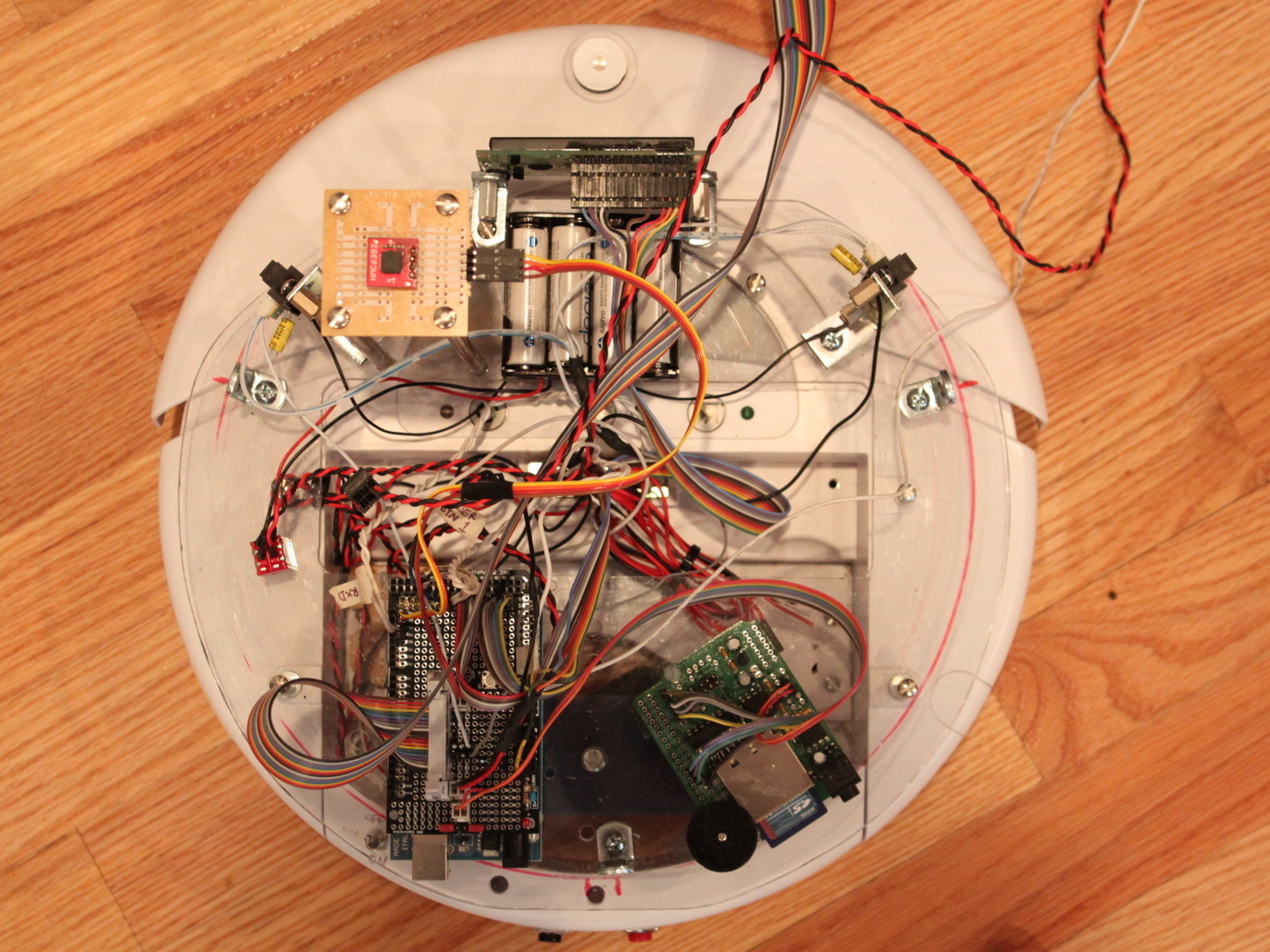
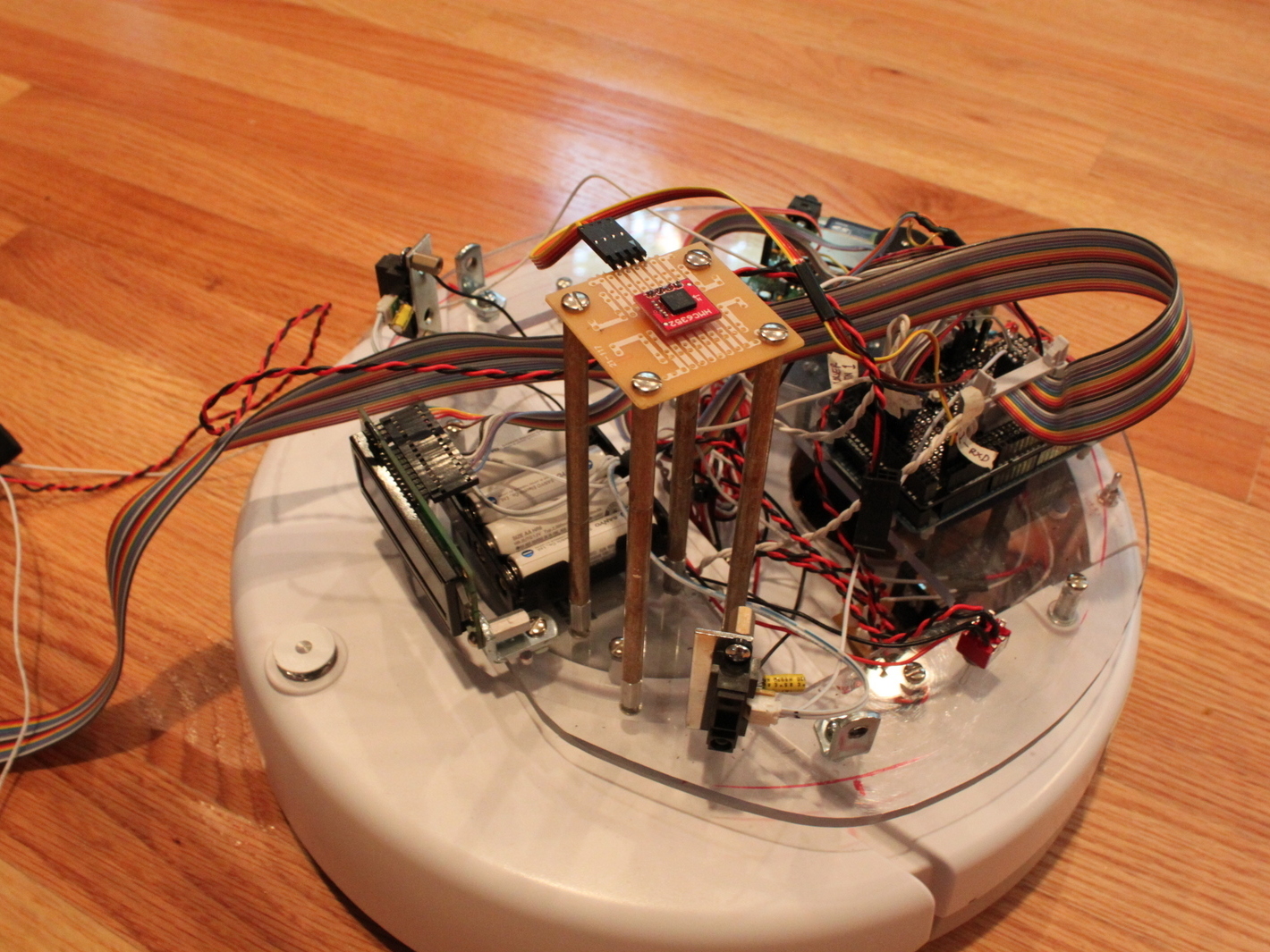
Belvedere is a robot I designed and built to serve appetizers at parties and entertain with jokes and dancing. He has the ability to navigate the first floor of our house while avoiding obstacles. Belvedere’s first job assignment was entertaining guests at our son’s first birthday! His main body sits on an iRobot Create, which he uses as a drive system. Here is a list of his main features:
– Navigates to one of four different rooms by turning a knob on his back
– Avoids obstacles using non-contact sensors (ultrasonic and infrared)
– Uses his British voice to offer food, make comments, and tell jokes
– His flat head is perfect for a plate of appetizers or a cooler of drinks
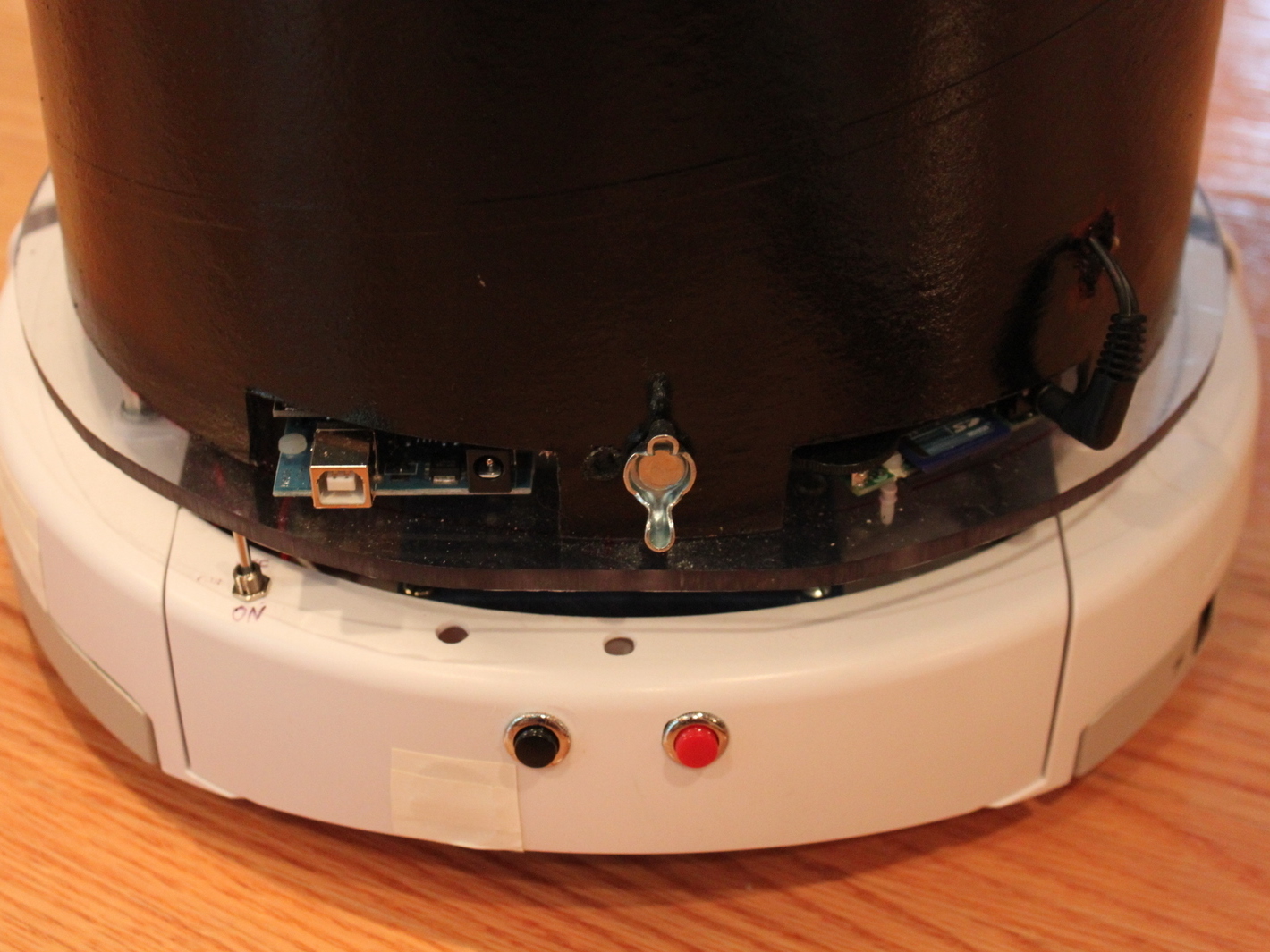
– He will play music and dance on command with a push of a button
– LEDs on his front light up in various patterns to show he is active
– Spinning bowtie!
See below for a video of Belvedere in action!
This project was inspired by many other robot projects. In particular, JoeCreate’s Serverbot instructable gave me many great ideas and Belvedere wouldn’t be a reality without his impressive work and documentation.
Detailed photos can also be found at this picasa album