This project is part 3 in the building a robot arm tutorial. In the first part I show how to design the arm and the second part shows how to design the base. Part four will show how to add control with an Arduino.

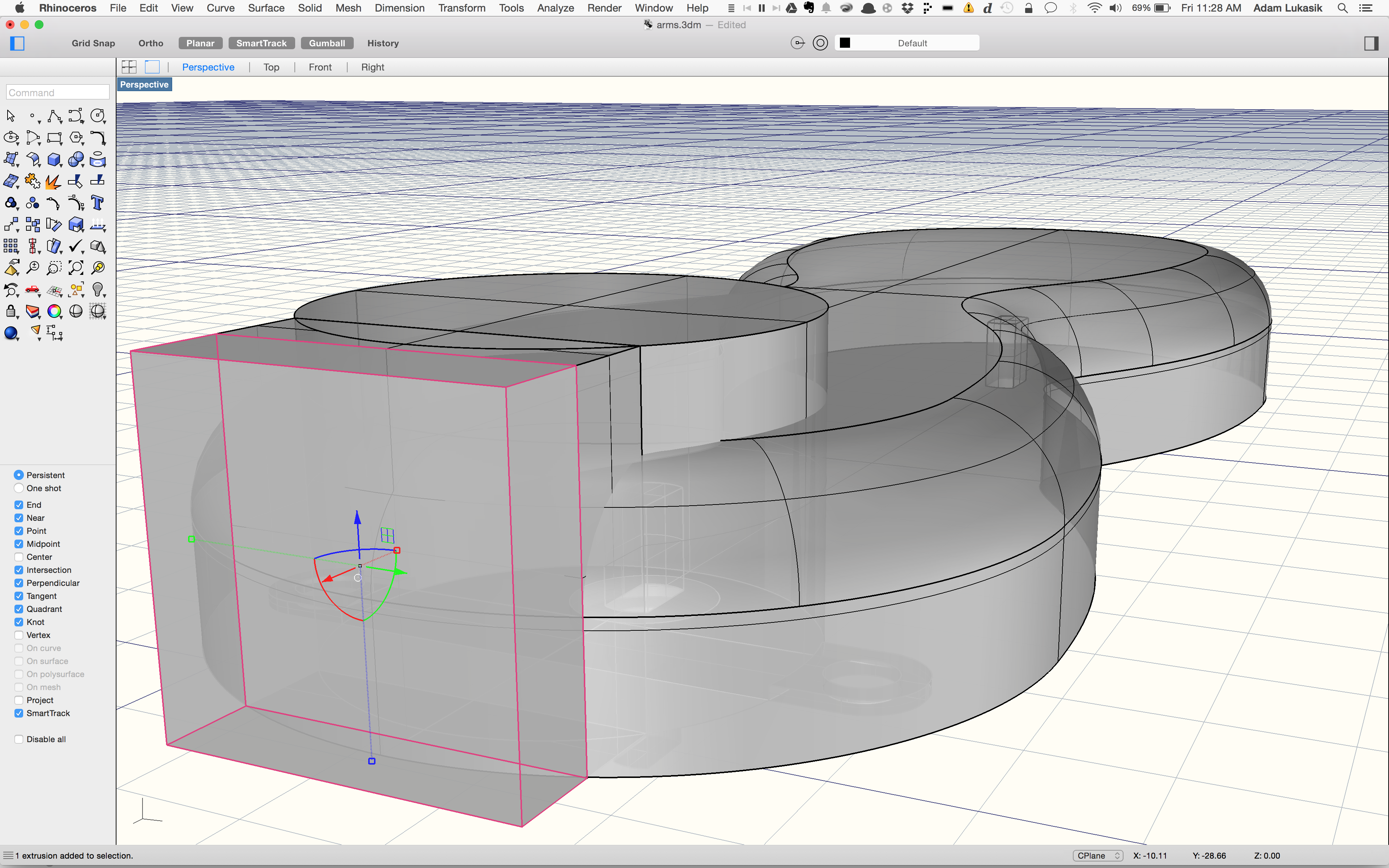
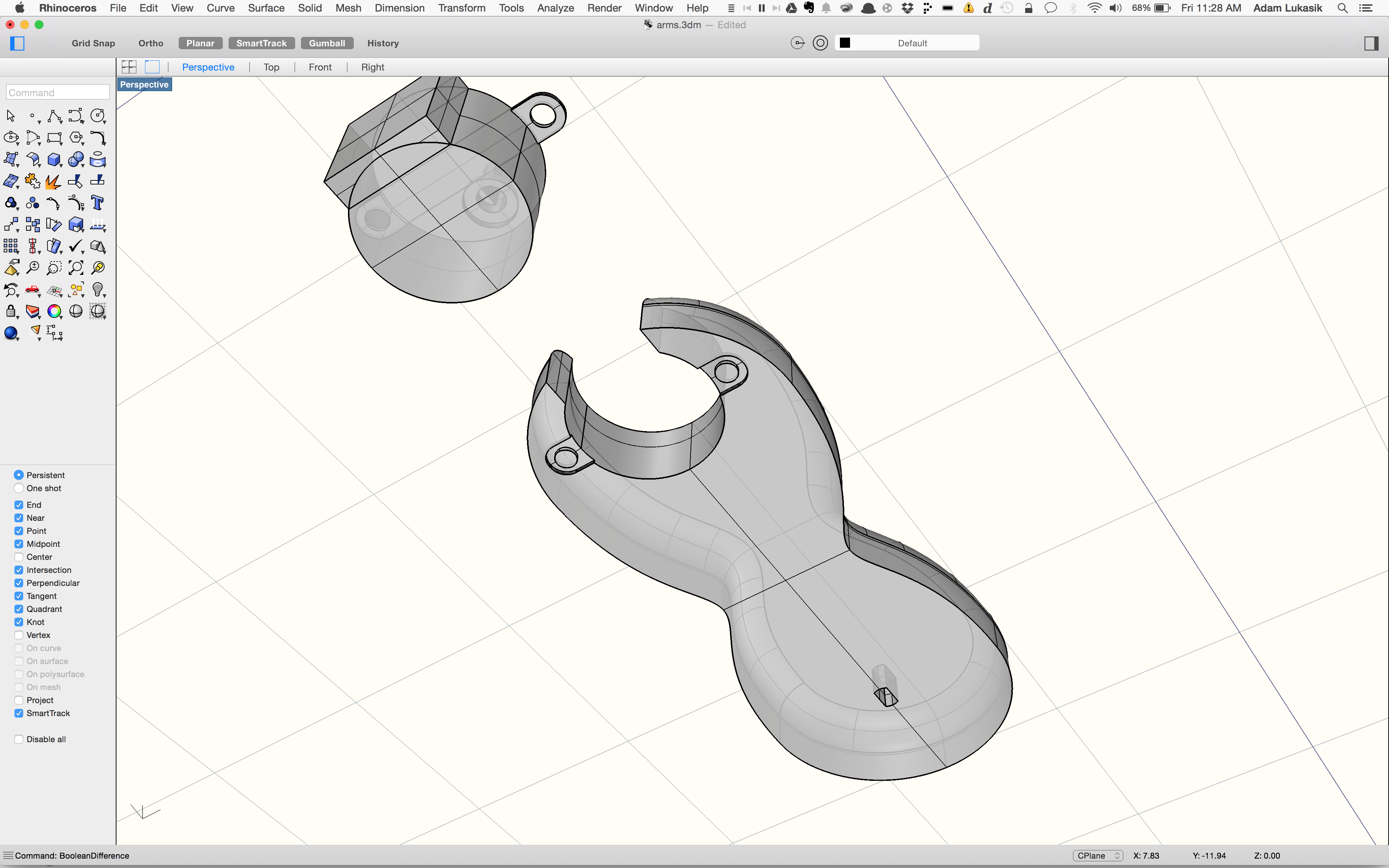
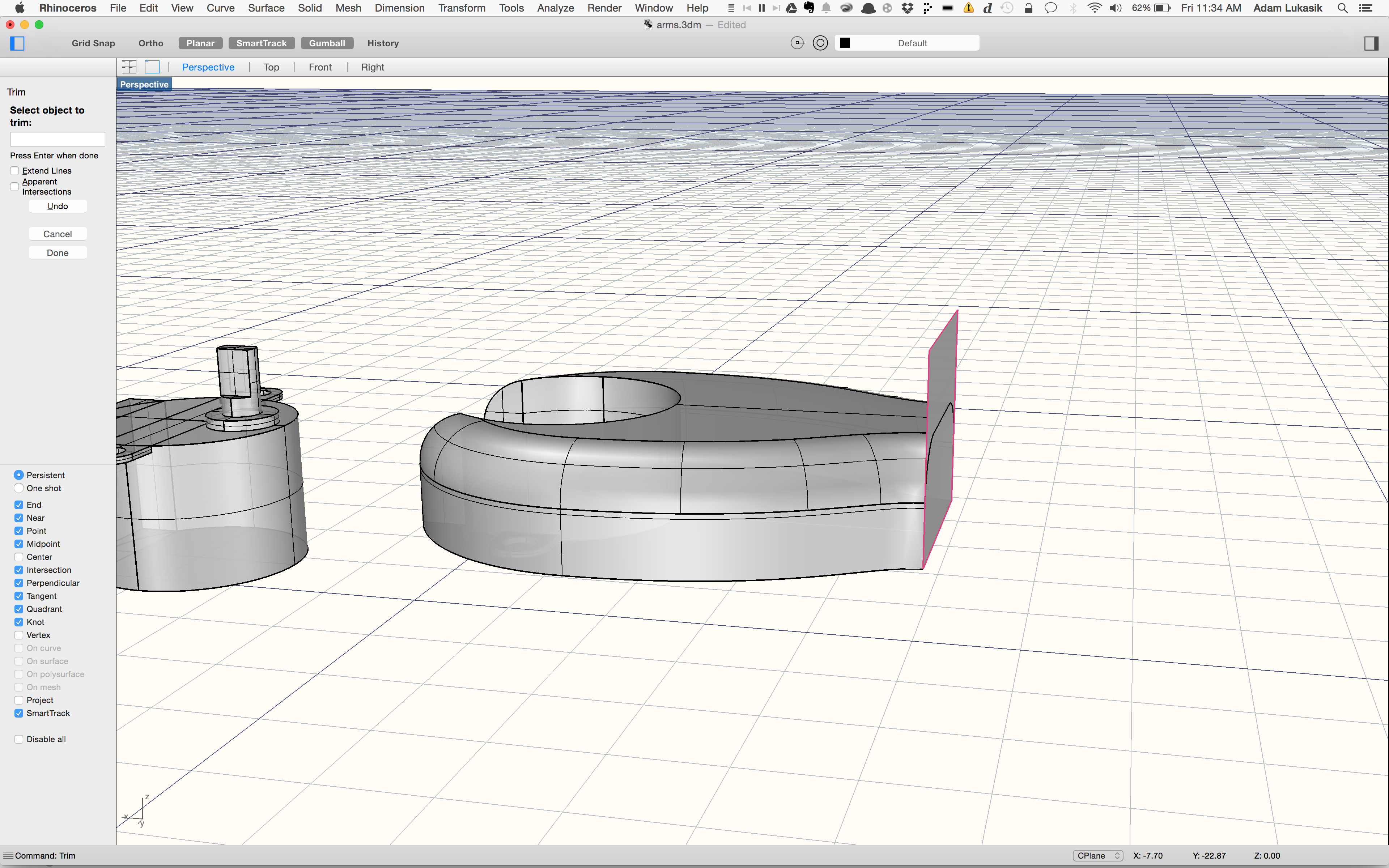
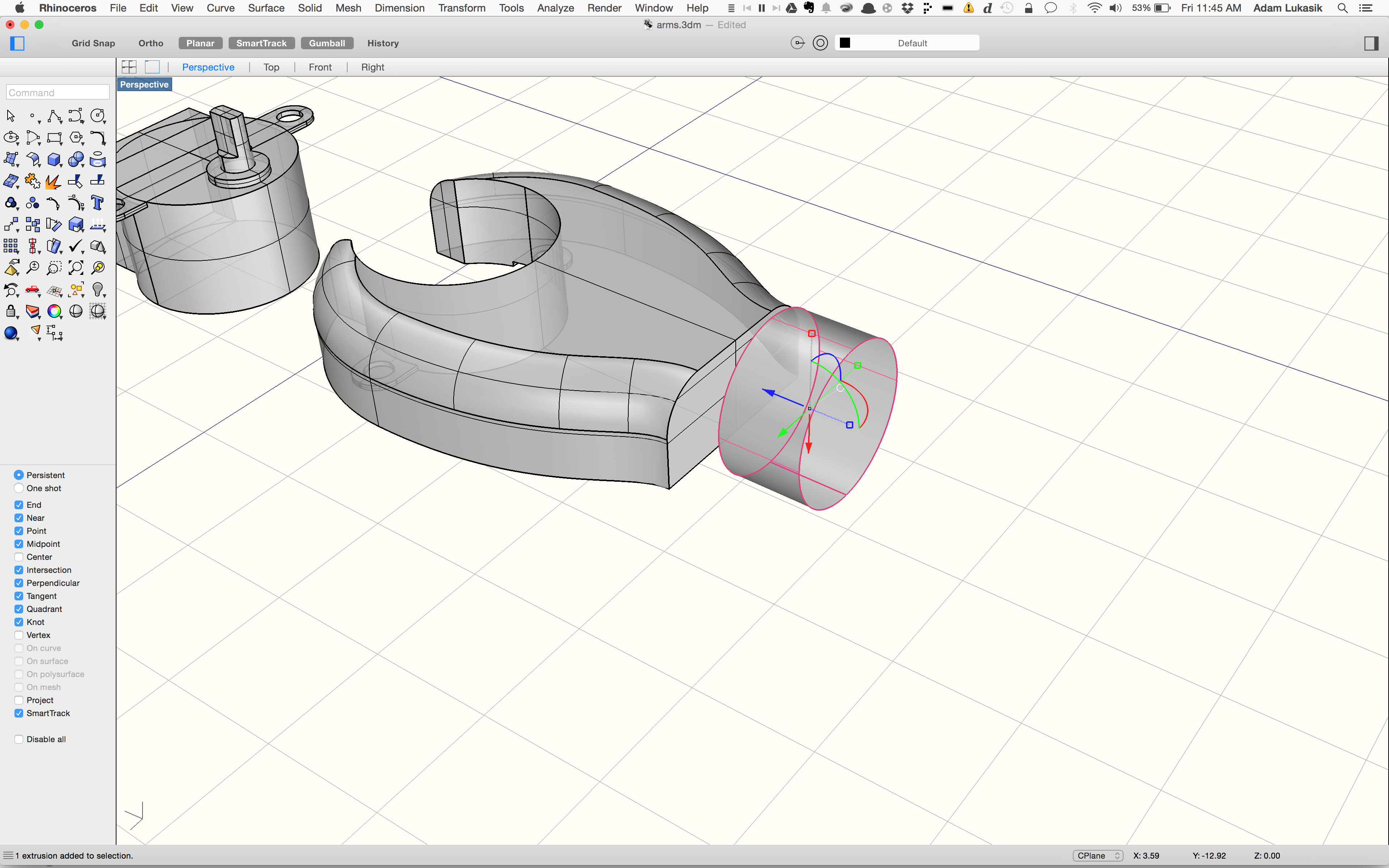
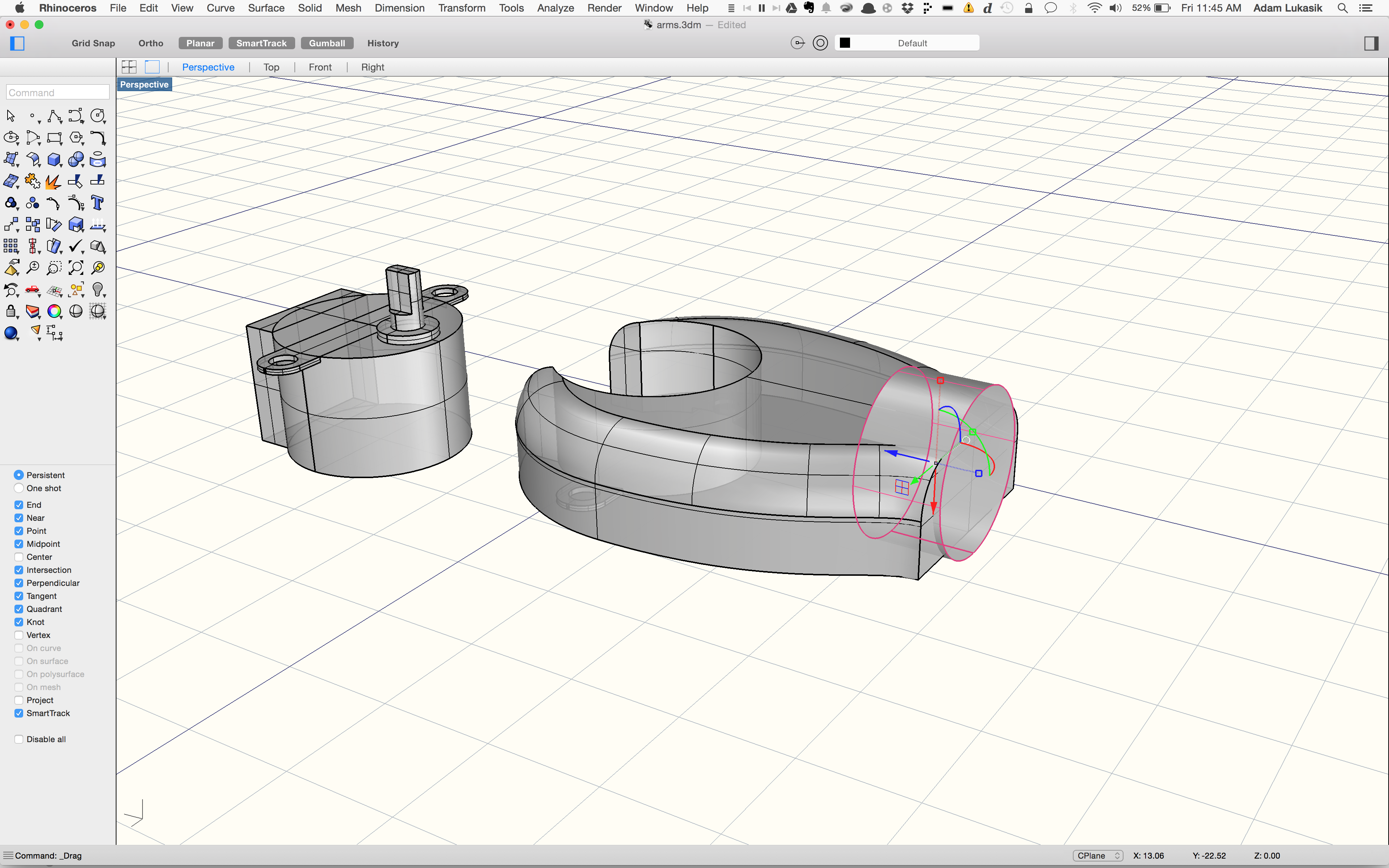
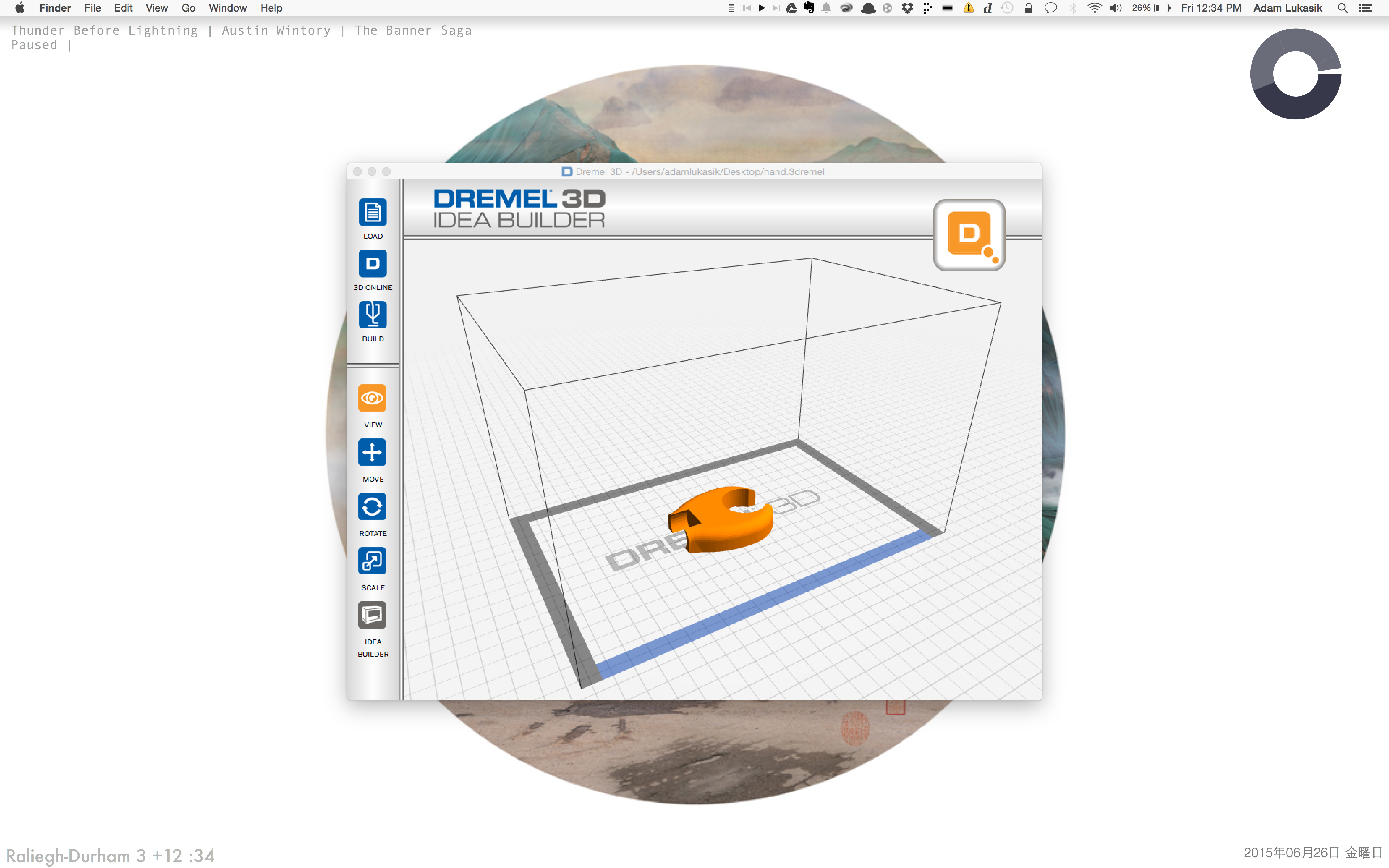
So far in designing our robot arm we have designed and printed the base and the modular arm segment. Now, after designing the basis of our robot, we are ready to design and print the final piece. Still, this piece is special; this is how we mount something to the arm.
I will be mounting a small speaker, though what you choose to mount will be entirely up to you. The important thing to keep in mind is that using the 3D modeling techniques and tools that I have discussed so far in these tutorials will help you design anything in a CAD software. That means you can mount a speaker on a robot arm, or a small computer screen, or a laser pointer, or even a small hand if you design it well enough.
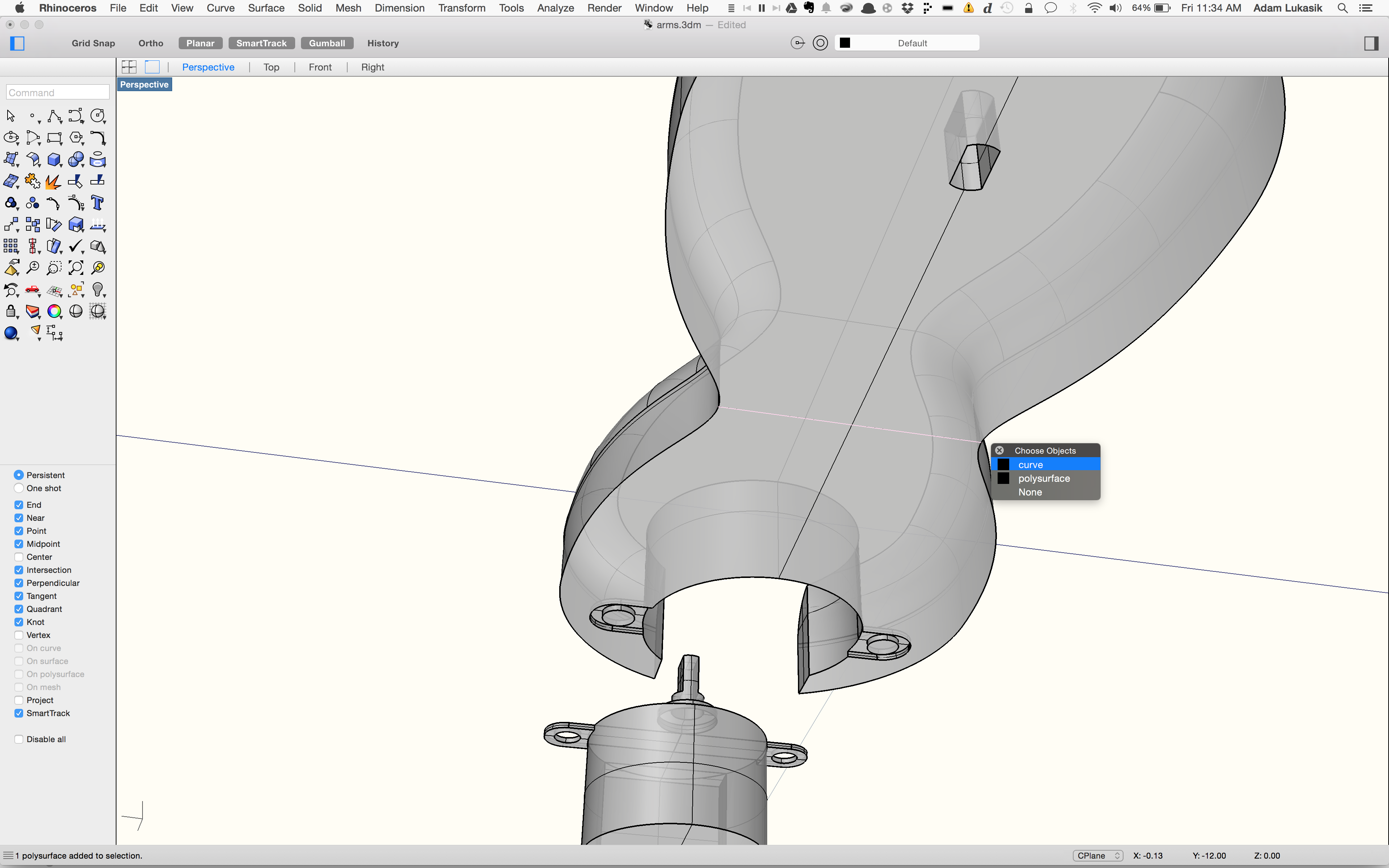
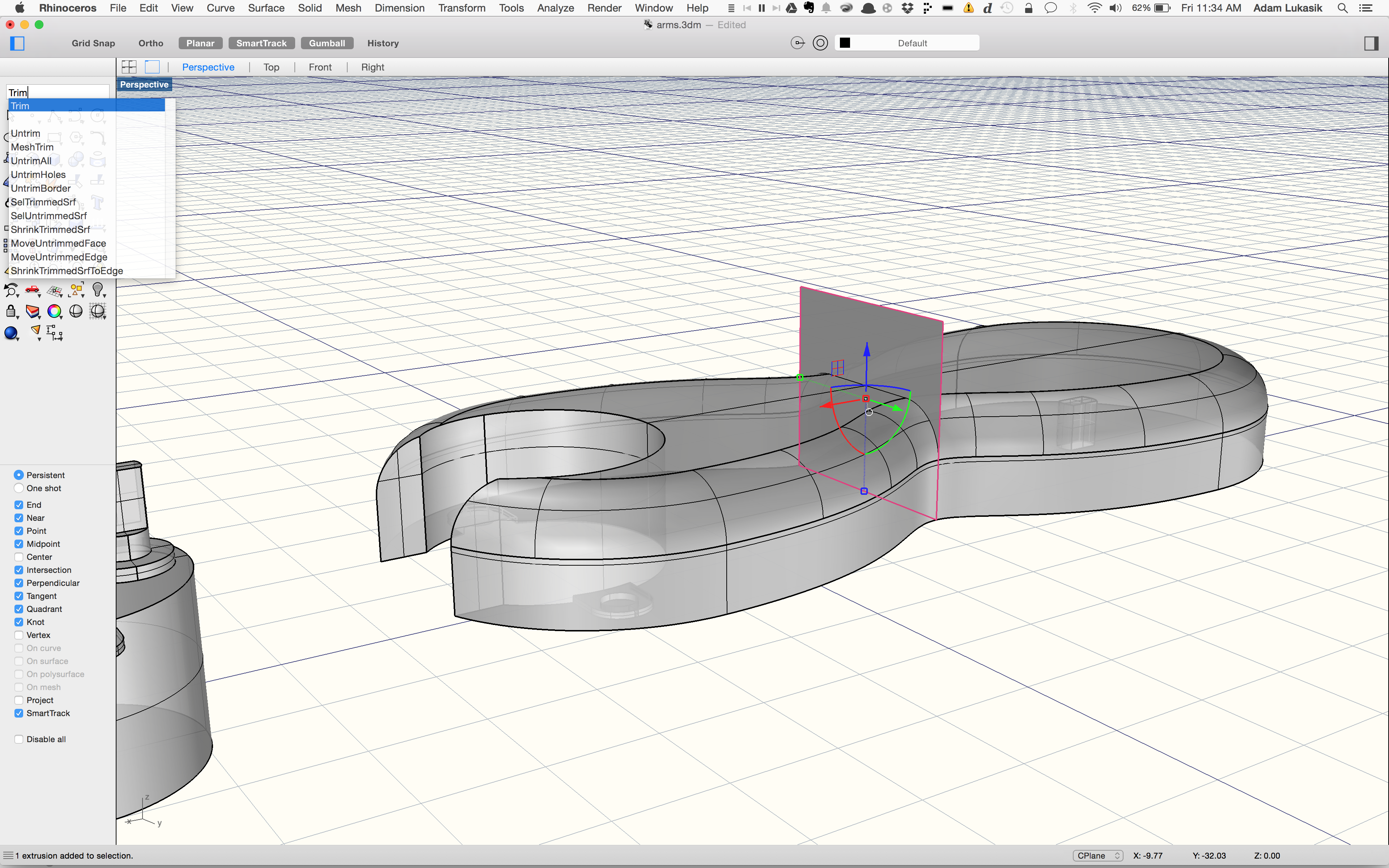
I am choosing to print and mount a speaker because I want my robot to be able to talk to people based off of their location to it. We will get to controlling the robot at that level after we finish designing and printing the main structure. Similarly to how the other parts of the robot are designed, we will take a step by step approach for how to create a mounting arm that will interface with our stepper motors and our parts we have already created.
The robot that we will design here will be relatively simple compared to what is possible, but keep in mind it is important to scale projects up only when we have a firm grasp on the fundamentals. Robots, and especially robots made with 3D printers, have limitations that are only defined by our imagination. Still, the more basic tools we know and practice, the better we will be at turning our ideas into real functioning robots. Eventually we will be able to turn this robot into anything we like.