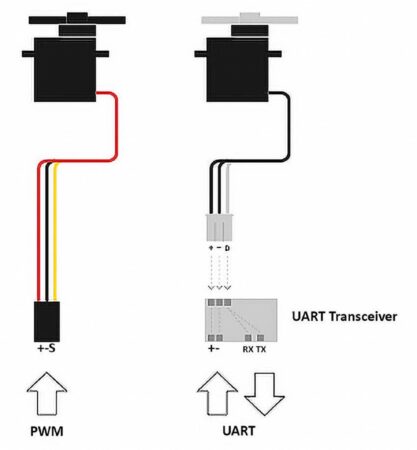
Servomotors are indispensable in the world of robotics, R/C model making, and automation, because of their ability to execute precise rotary movements. Traditionally they’re controlled via pulse-width modulation (PWM) — a method that works well in many cases, but reaches its limits in more complex projects. That’s where serial servos come into play.
In this article, we’ll take a closer look at these special servos. Serial servos are also called smart servos — and indeed, they are equipped with their own microcontroller. They’re controlled by digital packets, sent by serial protocols like UART and RS-485, but they also possess other interesting features that make them particularly versatile.
Serial Servos vs. PWM Servos
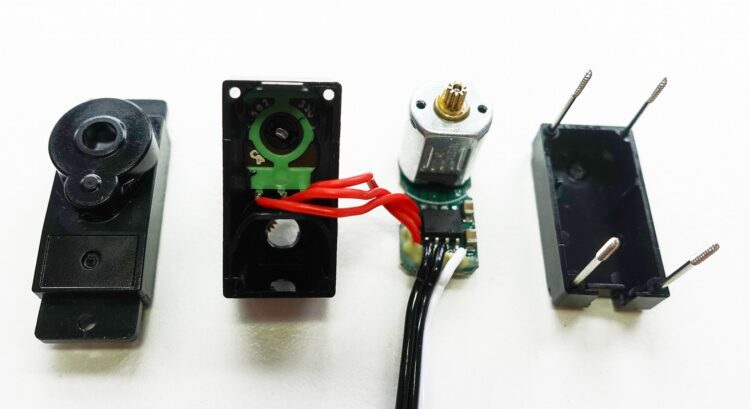
Unlike conventional servos, smart servos can control larger angle ranges and can also be operated continuously. But that’s not all — they can communicate too. Classic hobby servos receive their target angle as a PWM signal and execute the movement, but can’t provide any feedback; whether they actually achieved their desired angle remains uncertain. The smart servo includes a position encoder (magnetic, optical, or a simple potentiometer) and its serial communication is bidirectional — meaning telemetry data can be transmitted in both directions. Besides reading the servo’s position/angle, we can also read values such as input current, temperature, and holding torque.

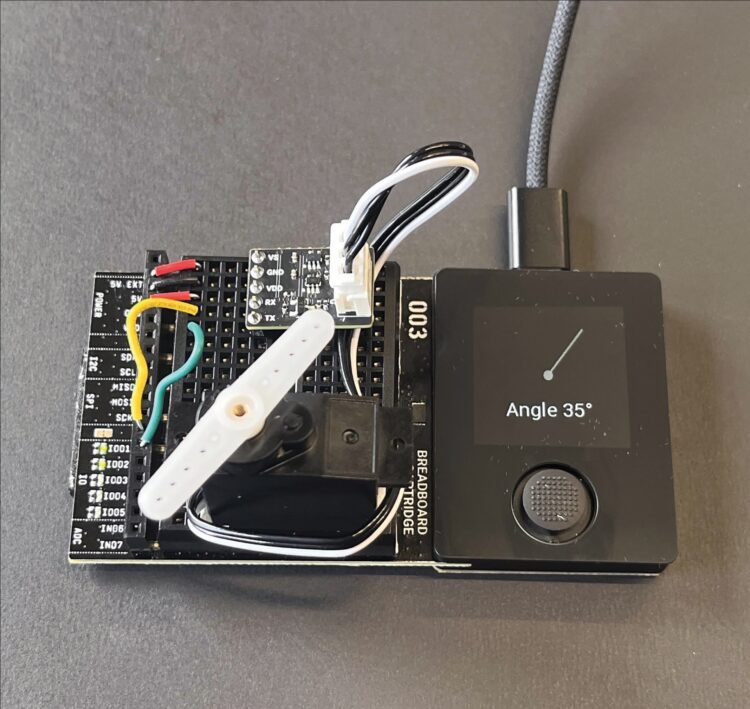
Since the smart servo’s current position can be queried directly, independent of a control loop, it can also be used as an angle measuring device. In robotics, for example, a robot arm can be moved manually into specific positions while the control system records and stores all the servos’ respective angles — in this way, movement sequences can be intuitively “taught.”
Holding torque also provides useful information: it indicates whether the servo is currently under load. If the system detects an unexpected blockage, this can indicate a malfunction. This principle is used, for example, in 3D printers, for detecting the end stop on a linear guide.

Photography by Thomas Garaio.
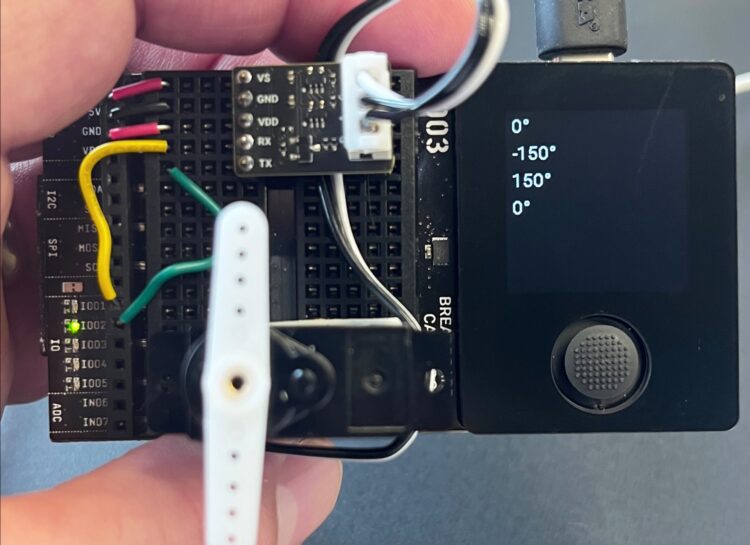
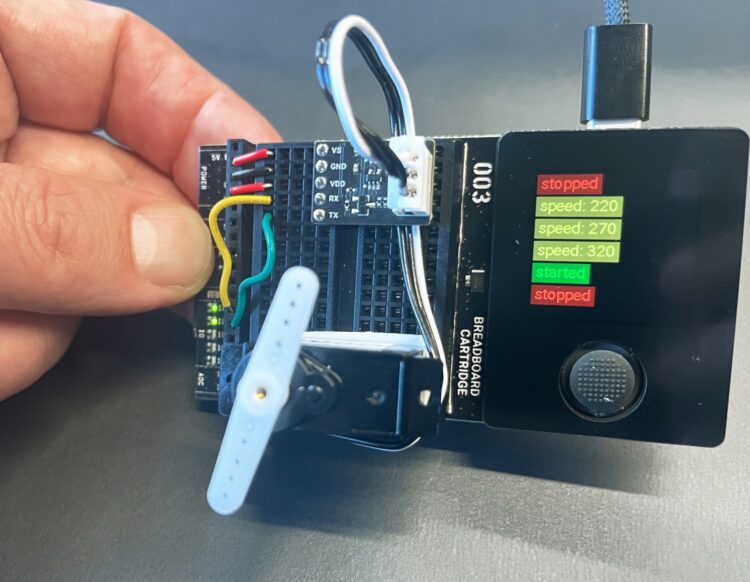
The servo we use here comes from the Chinese manufacturer Feetech, which offers models in different sizes and performance classes. Our model, Feetech SCS0009, is particularly compact and very affordable for hobby projects at just $9. It achieves a holding torque of 2.3kg, with an adjustable rotation range of up to 300 degrees — significantly more than classic analog servos. And our digital servo offers not only the integrated sensor functions we’ve mentioned, but also extensive configuration options — for example, for continuous rotation.
For a long time, serial servo control was considered technically demanding, but that has changed. Today, just a few lines of code are enough to get started right away. In this article, we’ll show you how it works.