


Don’t miss author Brandon Satrom building this project live on air! Watch Make: Live on Friday March 22, 5pm ET/2pm PT on Youtube or Facebook.

Hacking a toy is a fun way to see how real-world electronics are designed and built, and to tinker freely without ruining expensive gear. And cheap consumer electronics generally are a fantastic platform for learning and even building new, innovative solutions. So when Make: asked me for a DIY swarmbots project, I knew just where to go.
Radio-controlled (R/C) vehicles are a common target for makers, and cars with the Thunder Tumbler name provide an affordable, accessible platform for R/C car hacking. The Tumbler has been hacked a number of times before, but I don’t think it’s ever been used in a mesh network. That is, until now. Using Particle’s new, mesh-ready hardware, I created a swarmbot network of Tumblers that move in synchronized fashion at my every command!
A Lesson About Meshin’
How does mesh networking work? Most connected solutions rely on Wi-Fi or cellular networks for connectivity. This typically means that each device maintains its own connection to the internet. While this is useful for accessing the cloud for data storage or processing, sometimes you just want your gizmos to connect with other devices locally, regardless of whether an internet connection exists.
Mesh networking enables these scenarios by allowing you to create local networks of connected devices. The bulk of the network consists of endpoints that sense or actuate, and repeaters that increase the size and reliability of the mesh by passing messages between devices. In addition, a small number of devices — often just one — serve as gateways to maintain a connection to the internet. Critically, these local networks of devices can still communicate with each other when the internet connection disappears. For jobs like this, the Argon, Boron, and Xenon microcontrollers from Particle all provide built-in mesh-networking capabilities.
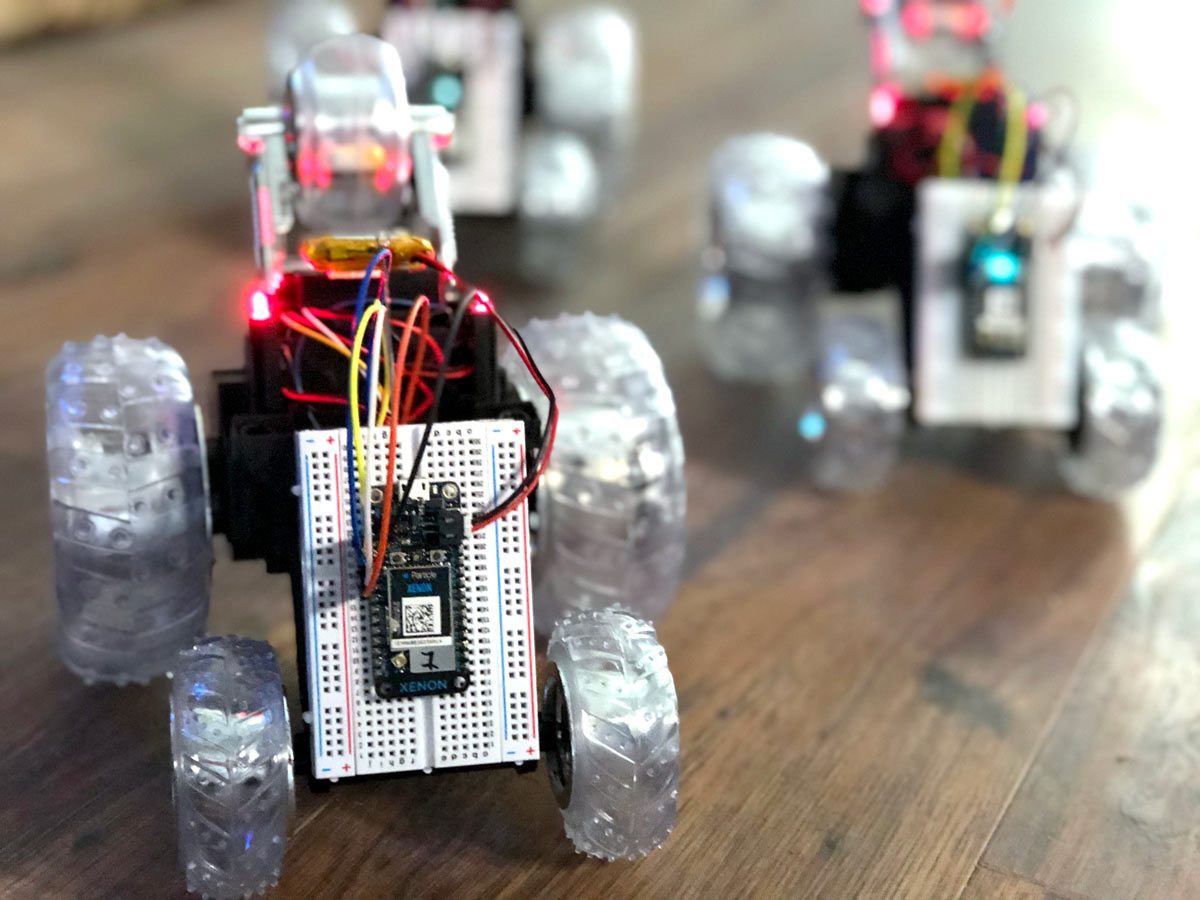
For this build, I used the Particle Mesh platform to create a network of R/C cars, each controlled by a Particle Xenon. All of the Xenon R/C cars are endpoints, and are connected to a mesh network with a single Particle Argon as the gateway. Once the network is established, I can use local network messaging to send low-latency commands to all nodes on the network and make my R/C cars dance.
First, however, I needed to hack the off-the-shelf Tumblers to Particle-power them!















