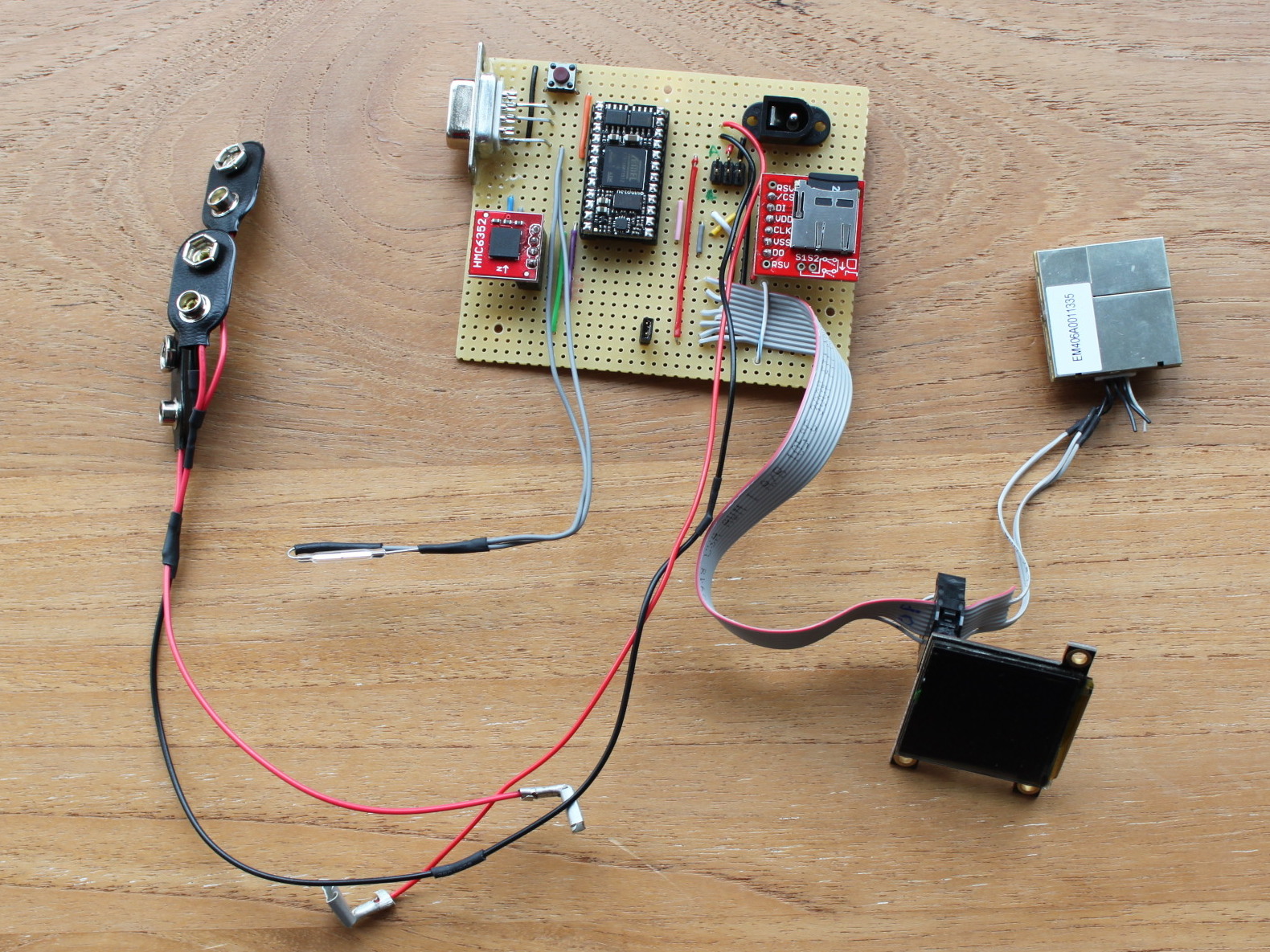
As far as the electronics goes, all the components are connected to the Netduino using their standard protocols.
The compass is connected via I2C to the Netduino (pins 9 and 10).
The micro SD breakout board is connected using SPI (pins 14-16). All the hard work communicating with a file system on the card over SPI is done for you by the guys at Secret Labs and Microsoft.
The two servos (for the lock and the arrow) are controlled using PWM (pins 17 and 18).
The only slightly tricky bit is the OLED display and the GPS. They both need 3.3V serial but the Netduino Mini only has one 3.3V serial port. The other RS232-level port was used for programming the device.
Luckily we only write to the screen and read from the GPS, so I manage to get them to share the serial port.
By another stroke of luck, the OLED display also provides a useful regulated 3.3v output to power the compass and SD card.
My initial prototyping was done using a standard Netduino which had 2 3.3v serial ports and a regulated 3.3v output to power the compass and SD card. If you’re new to the Netduino, I’d recommend this as an easier starting point than the Mini.