
This project is a continuation of my quest to build a robotic clock that can write and rewrite the time continuously, day in and day out. My first attempt, Doodle Clock, was a failure due to the marker drying up. Doodle Clock #2 failed because the display — a kids’ magnetic drawing board — soon got scratched.
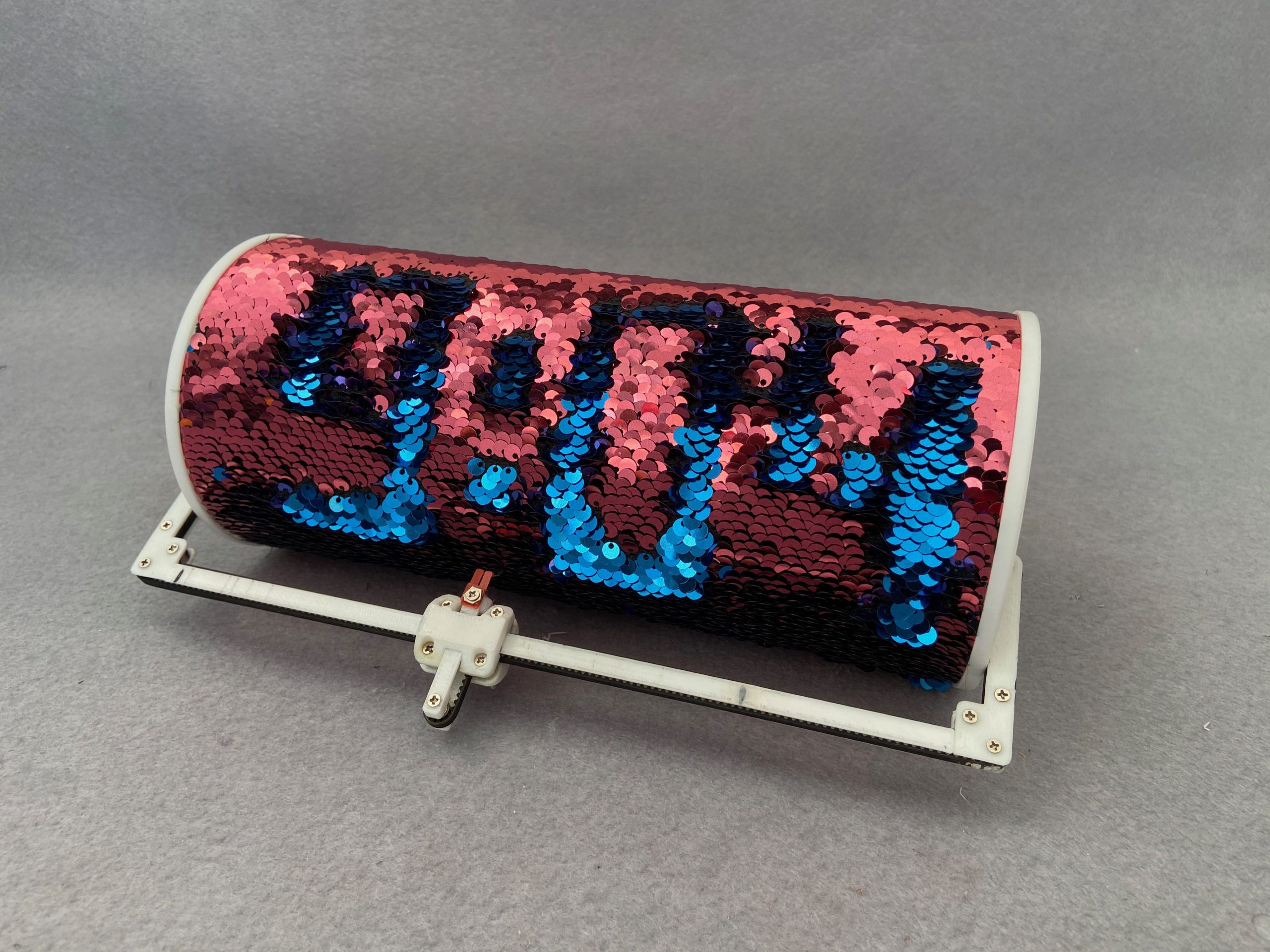
This new clock, Sequino, was inspired by my daughter’s T-shirt with the pattern-changing sequin cloth glued to it. After getting some stock sequin fabric from a vendor, I figured out the size of the clock based on the minimum resolution of the cloth: it has 5mm circular sequins stitched 3mm apart. Another limit of the clock was my 3D printer bed size of 245mm×170mm.


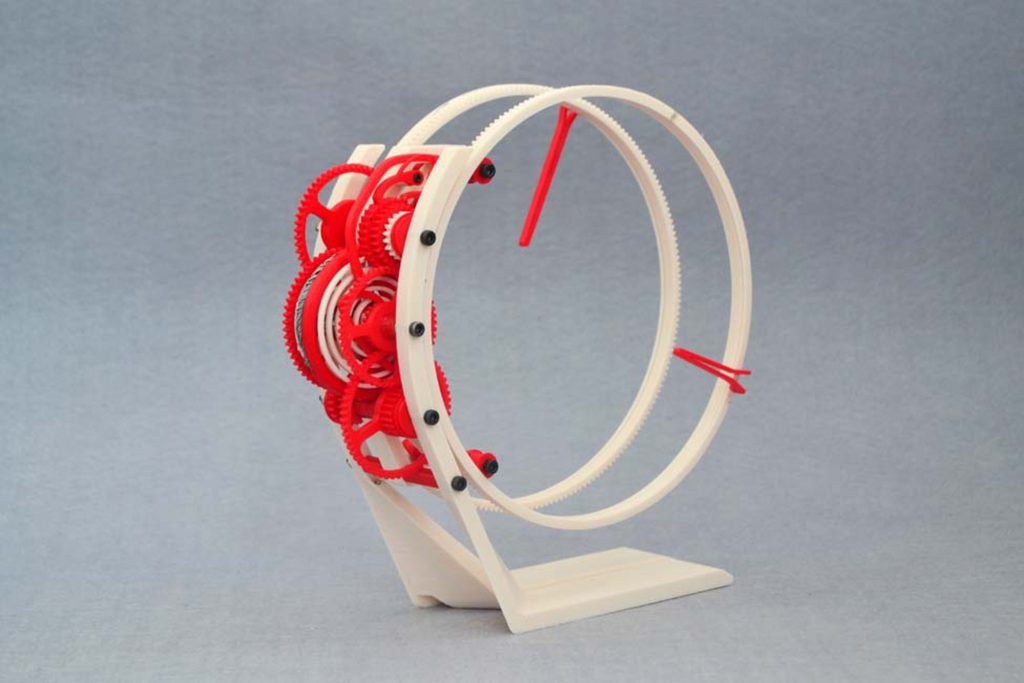
 A). The y-axis is a hubless axis consisting of two rings on the extreme ends of the clock (Figure B
A). The y-axis is a hubless axis consisting of two rings on the extreme ends of the clock (Figure B ) driven by two 24BYJ48 motors. The rings are basically gears constrained in outer rings, similar to a hubless wheel.
) driven by two 24BYJ48 motors. The rings are basically gears constrained in outer rings, similar to a hubless wheel.
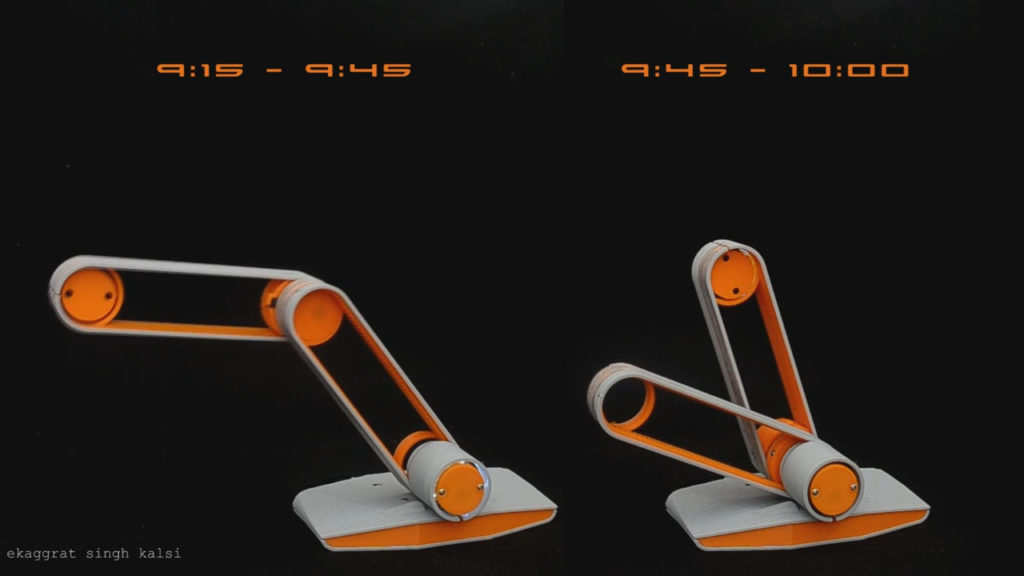
 C). The belt is driven by two motors; when these move in the same direction, the pen carriage moves left or right on the x-axis, and when they move in opposite directions the belt tension moves the “pen” up or down (z-axis) to engage with the sequins.
C). The belt is driven by two motors; when these move in the same direction, the pen carriage moves left or right on the x-axis, and when they move in opposite directions the belt tension moves the “pen” up or down (z-axis) to engage with the sequins.

 D).
D). ).
).