

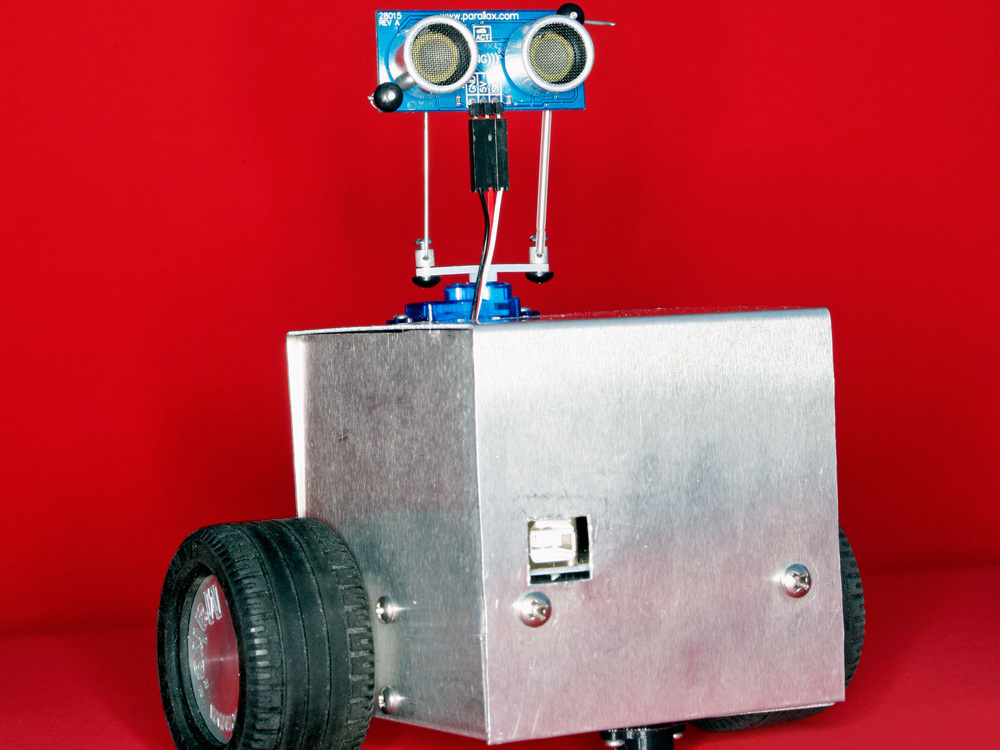
Makey is an autonomous robot that I’ve programmed to follow objects around and avoid obstacles. It has a fully enclosed chassis and uses tank steering, where separate DC motors power each of the 2 drive wheels.
Control comes from an Arduino microcontroller and a servomotor moves Makey’s head, which carries a single ultrasonic rangefinder. Makey constantly turns its head right and left to acquire differential ranging data, adding to its personality.
With different Arduino programming, the hardware would support mapping and other activities, and a few hardware mods would enable Makey to compete in Mini-Sumo, a popular event in robotics competitions.