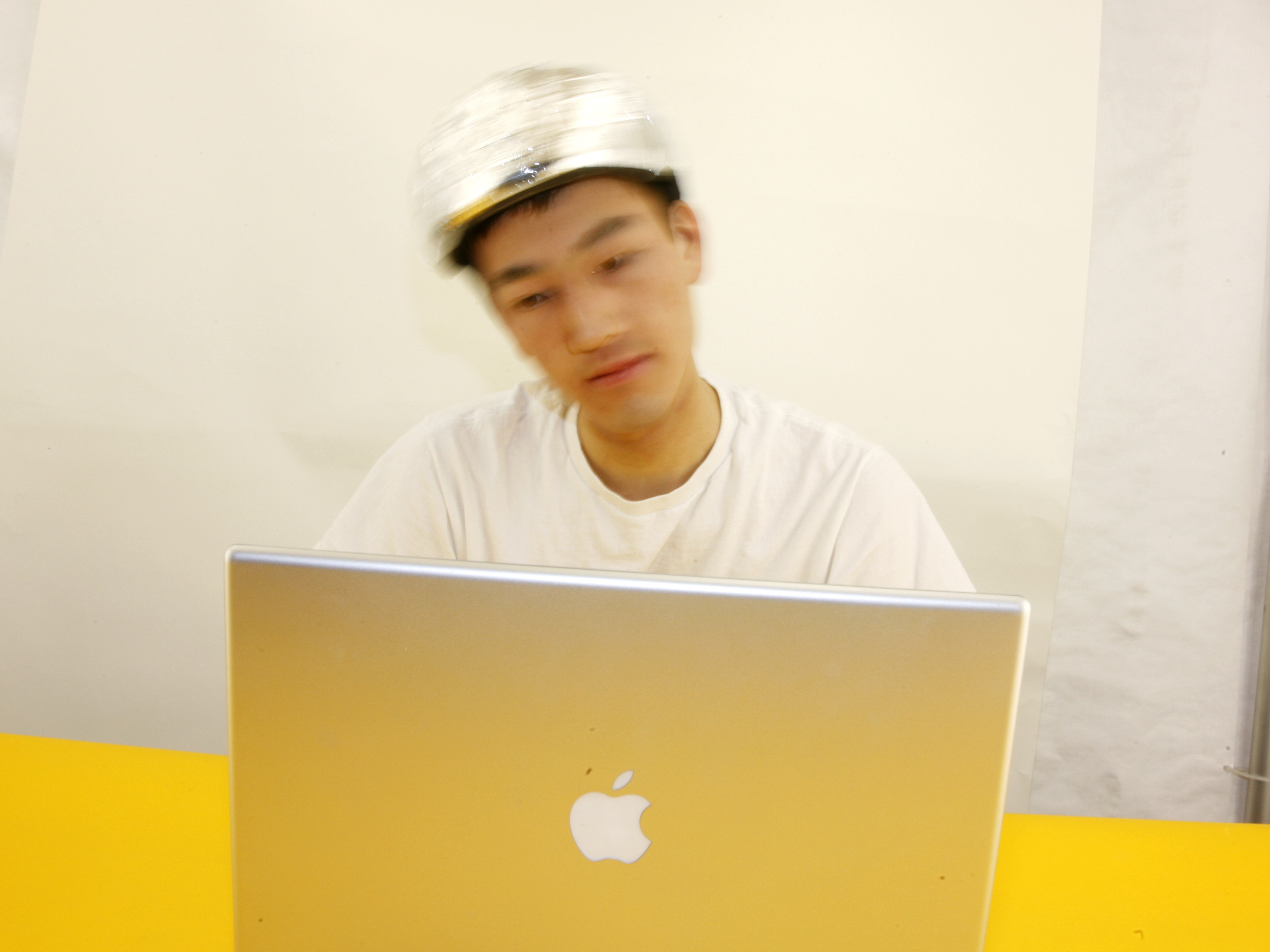
In recent years, researchers have developed technology that allows people to control computers and wheelchairs with their brain waves. My Mind Surfer is a helmet that seems to allow its wearer to control a toy vehicle via brain waves, but the technology is based on something much simpler than brain waves. It has a Nintendo Wii Remote hidden in it.
Ask a friend to wear the Mind Surfer and tell him if he wants the cursor (or robot, or game character) to move left, he must imagine the left side of his head growing warmer or heavier as he “concentrates his brain’s electrical energy.” Chances are, he’ll subconsciously tilt his head a couple of degrees to the left. The Wiimote detects the tilt, and your unsuspecting victim will be astounded to see that your helmet can “read” his thoughts!
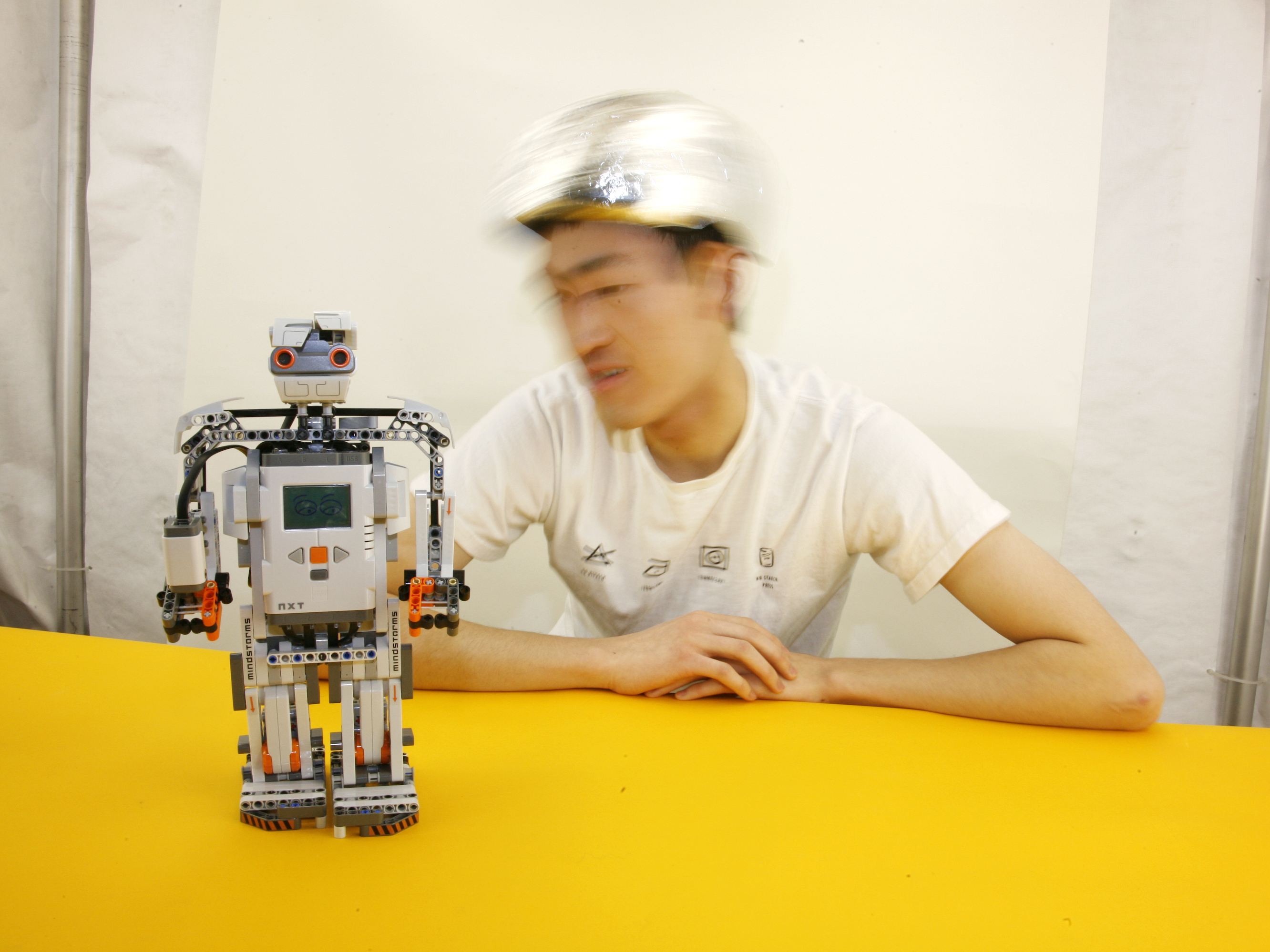
The Nintendo Wii Remote can sense the magnitude and direction of tilt relative to gravity, and convert these into outputs for the device of your choice. You have myriad programming options to choose from; I’ve used GlovePIE and LabVIEW to control a cursor and a Lego NXT robot, respectively, but what I’ve outlined in this article is the simplest option: a Windows program called WiinRemote.
Functional Overview
The Nintendo Wii Remote provides the Mind Surfer with a nicely bundled 3-axis accelerometer and Bluetooth (2.4GHz-band) radio. The accelerometer measures acceleration relative to free-fall; an accelerometer falling into a bottomless pit would measure 0g on each axis. A Wiimote sitting flat, face up on a table, would read 1g force on the vertical z-axis and 0g on the flat y and x axes, and as you tilted the Wiimote to the right the z-axis would decrease and the x-axis would increase.
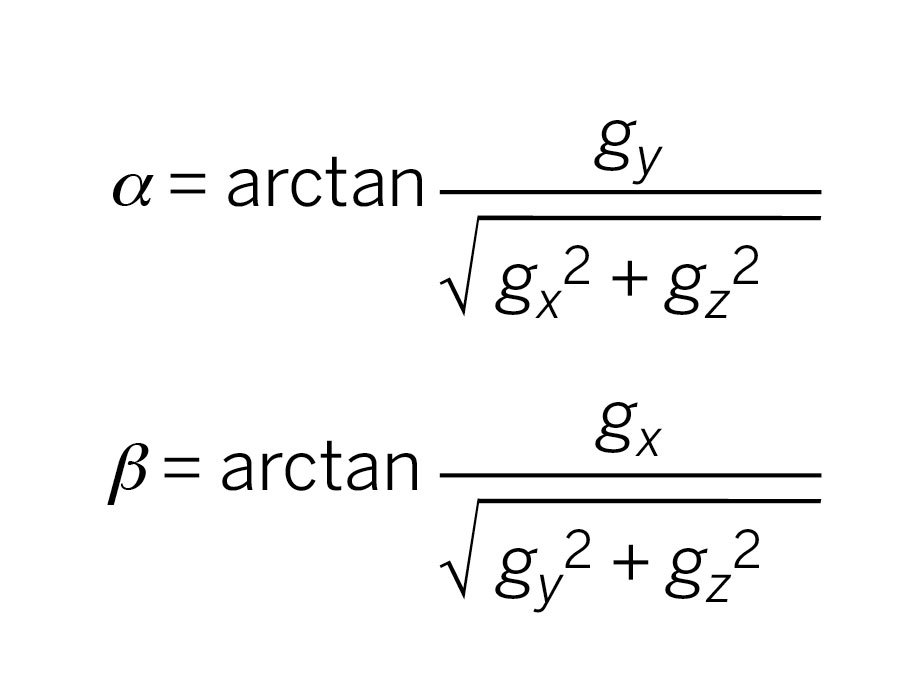
If we assume that a person wearing the Mind Surfer is only tilting her head, not changing her location, we can use the accelerometer data to determine the tilt of the user’s head relative to gravity.
Note: Accelerometers cannot detect yaw (turning/rotating the head left or right), only roll (tilting the head right or left, bringing the ear slightly closer to the shoulder) and pitch (tilting the head forward or back).
A computer receives and processes the accelerometer data via Bluetooth and sends outputs to the cursor, while a redecorated bicycle helmet provides a good casing to hide the Wiimote from inquisitive users and keep it oriented with the user’s head. By creating a cradle with a cover, you allow the Wiimote to be moved easily in and out of the Mind Surfer when you switch back to playing Wii Tennis.