In this project, we’ll build a small, vertical-axis wind turbine, or VAWT for short. These are not as efficient as their horizontal-axis cousins, but they are better suited to urban environments where wind can come from all different directions.
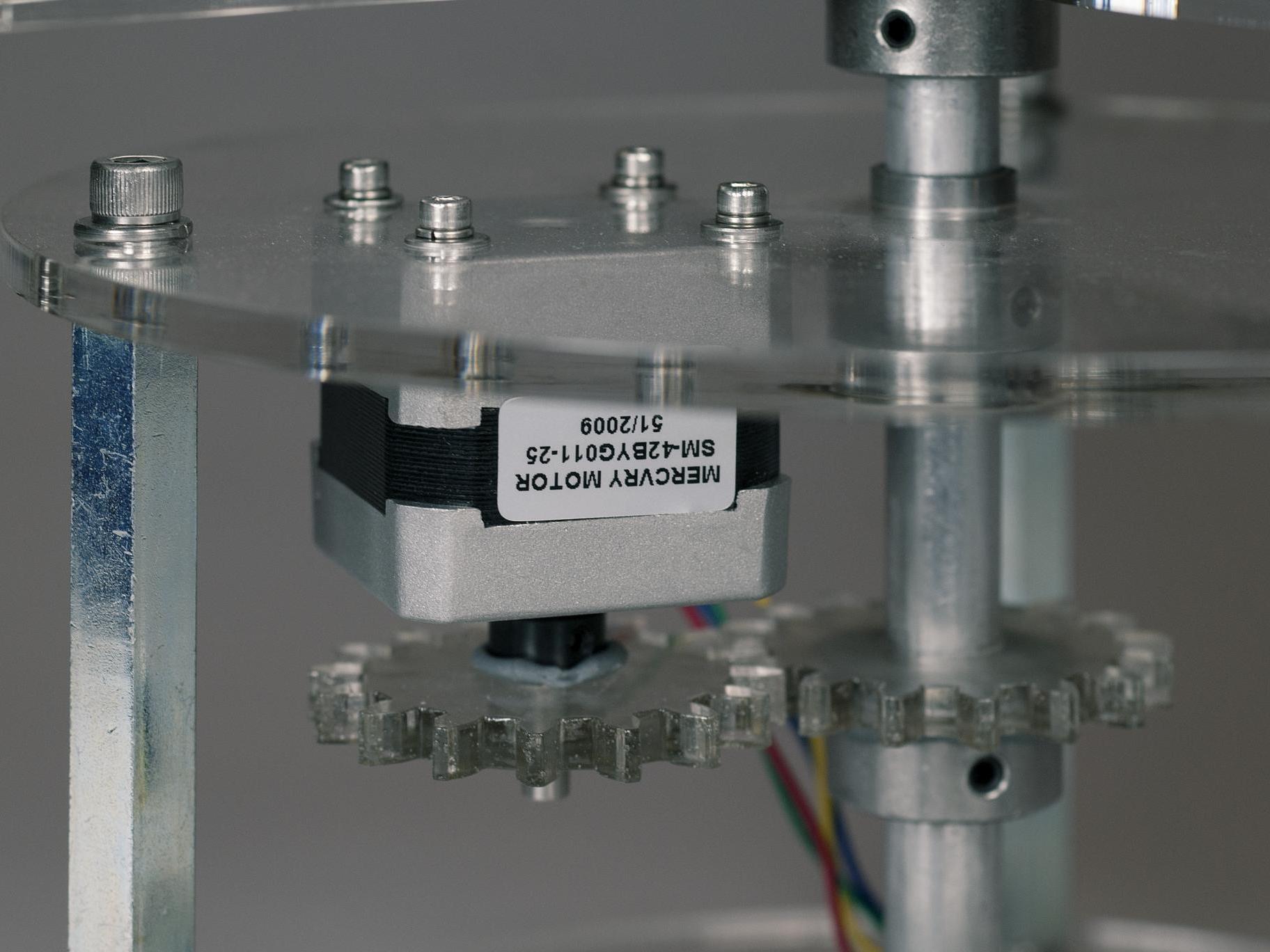
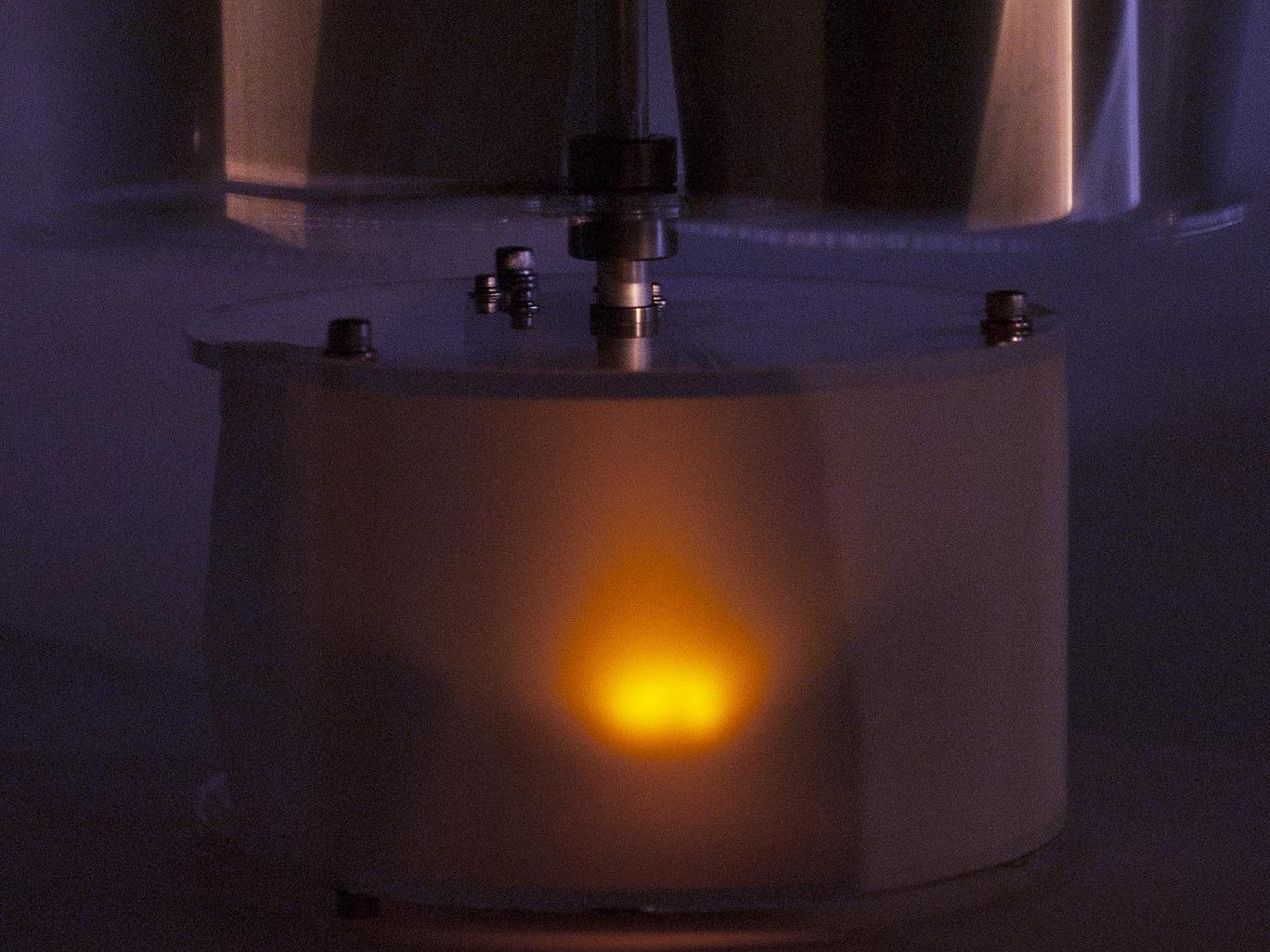
Normally, when you give electricity to a motor, it spins. The same is true in reverse: If you give a motor a spin, it acts as a generator and creates electricity. The wind lantern will use energy from the wind to turn a motor and the resulting energy to light up some light emitting diodes (LEDs) within the base. The wind lantern will use this electricity to create a flickering, glowing indicator of the wind.
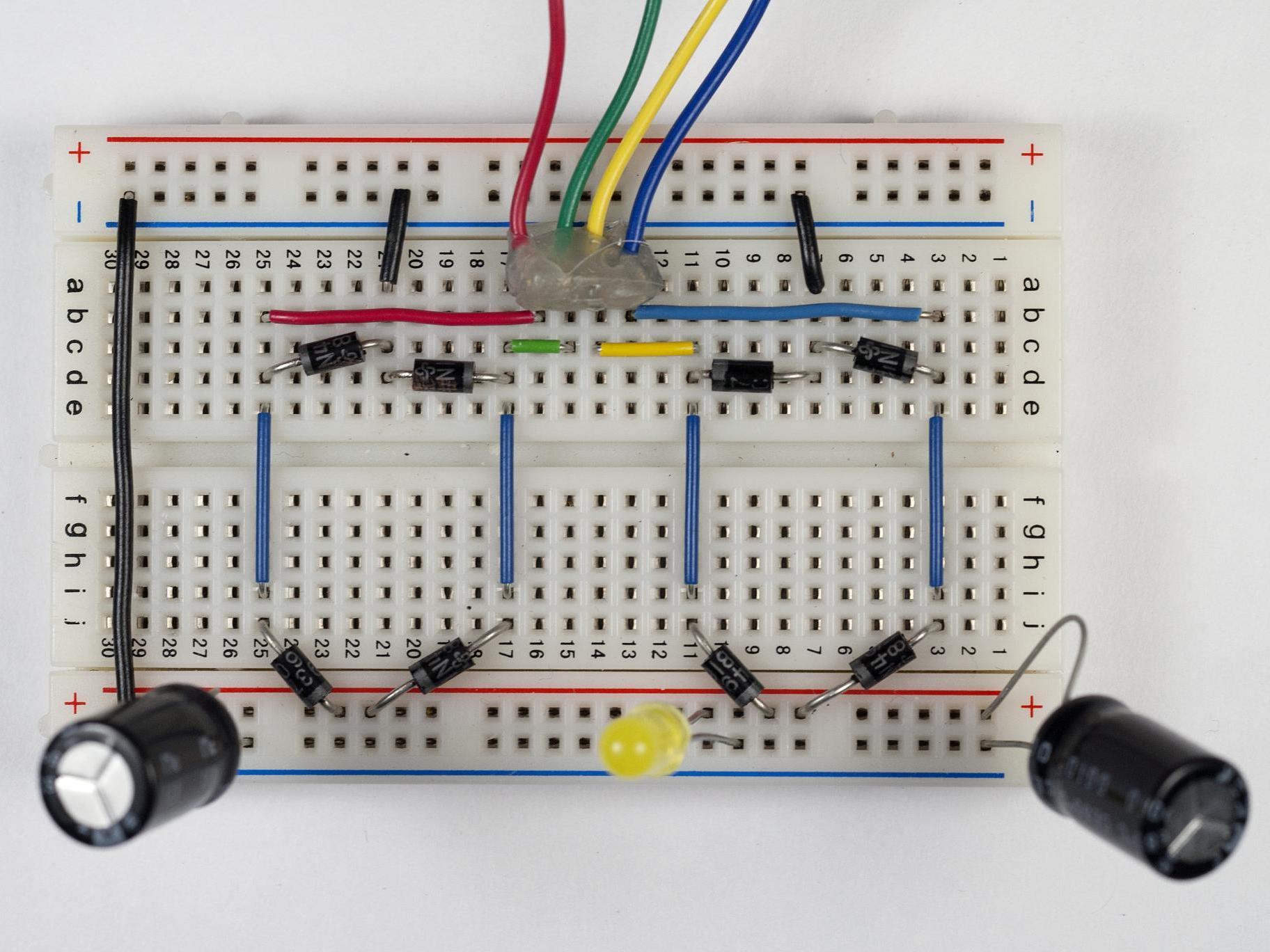
LEDs, like any other diodes, allow current to flow through them in only one direction. Bipolar stepper motors have two wire coils. The challenge here is to design a circuit that directs energy generated in each coil through an LED in the correct direction, no matter which way the wind lantern spins. To do this, we’ll build a rectifier circuit for a bipolar stepper motor.
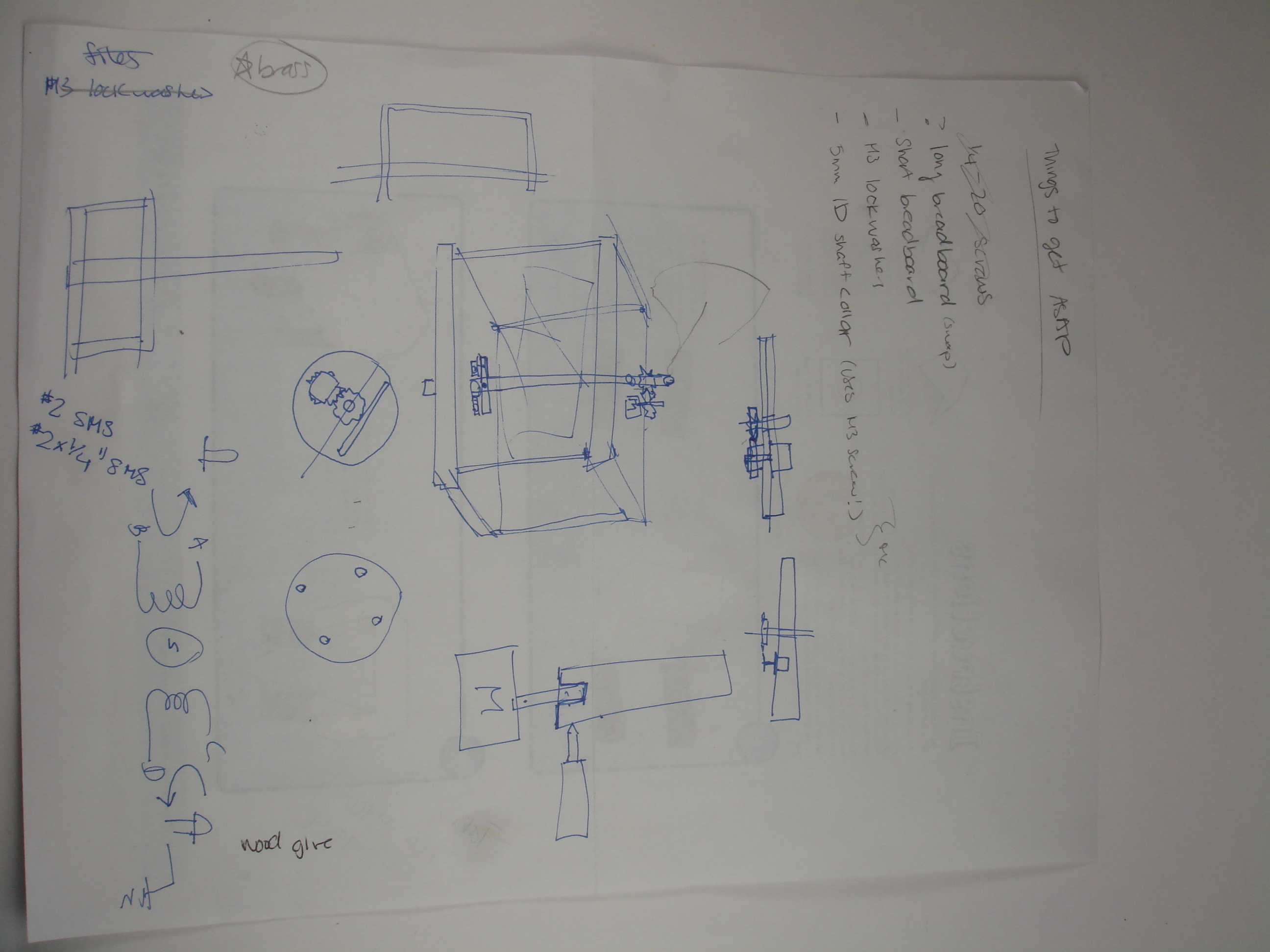
You can download the FREE template here on Thingiverse, or go ahead and buy them from my Ponoko showroom.