Ben Light is a New York based maker, designer, and Cash Cab contestant. Ben's work has appeared in the Museum of Arts and Design, the MoMA Design Store, and on the shelves at Crate & Barrel. He earned a B.S. in Mechanical Engineering from Lehigh University and a Masters from NYU's Interactive Telecommunications Program (ITP).
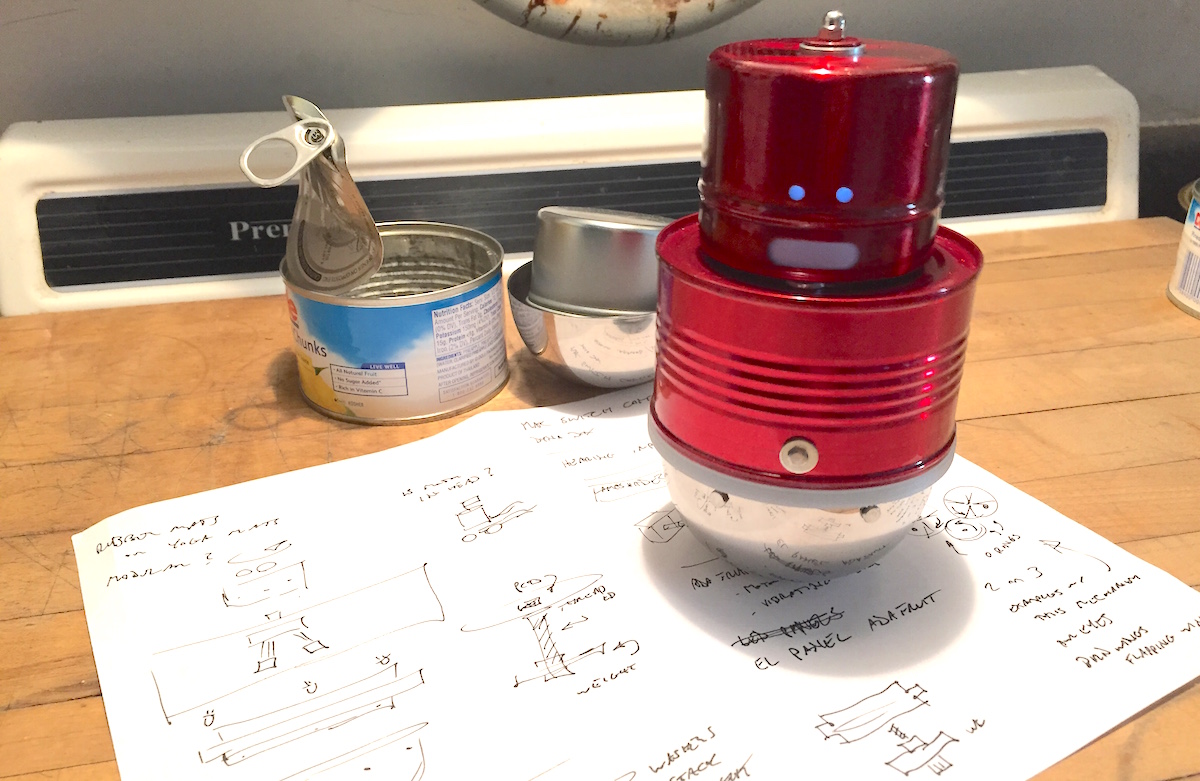
After preparing a tasty pineapple snack, you will have the raw materials to build your own wobbling robot toy. This little guy will shake and vibrate when you turn his head. There is a lot of machining and electronics work in this project, so feel free to tweak the robot recipe if you have better ideas or techniques.