



OpenROV’s new Trident is a powerful, speedy vehicle that can remotely navigate underwater locations never before accessible.
Over the past few years, OpenROV has helped put underwater science into the hands of everyone with their affordable, open-source underwater submersible. The toaster-oven-sized device has allowed students, professionals, and hobbyists to exploring sunken ships and underwater caves, while transmitting video data back to the pilots for analysis. But despite the many benefits it provides, its design is best suited for calm conditions where its easy, slow pace can work uninhibited.
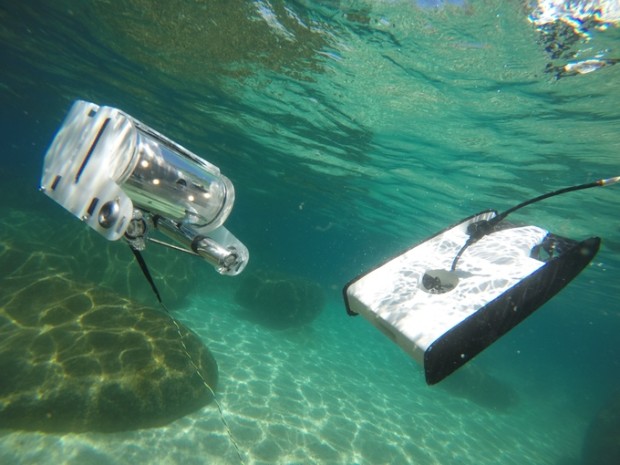
The Trident, launching today on Kickstarter, is more of a dolphin than a rover. Instead of housing its electronics (including an updated camera — 1080p at 30fps) in OpenROV’s traditional, boxy package, Trident uses a sleek wedge body that moves like an underwater flying wing. It’s an agile yet practical vehicle — the device dashes and spins with the push of its levers, then stops and pans where needed.
Trident’s setup allows for much more powerful control in strong currents and tidal conditions. While the new platform was under development, OpenROV cofounders Eric Stackpole and David Lang told me about one of their expeditions in the San Francisco Bay on a day when notoriously strong currents were even more intense due to a big rain storm. The conditions made it challenging to use the original OpenROV, but they giddily explained that the new craft would cut through the current much more powerfully.
It’s not just the speed and power that makes the new Trident platform interesting; the smaller size allows for more portability (it weighs less than 3kg, and fits in a backpack), and the OpenROV team writes that its sleek underwater movement allows for long, straight shots, useful for surveying large underwater areas. The rig will come with a 25-meter tether, but OpenROV is also offering a 100-meter option, and Lang tells me that the protocol allows for up to 300 meters of communication, so even longer tethers may be developed in the future.
Following their original ROV’s $100,000 funding on Kickstarter in 2012, OpenROV is now making Trident available as a backer reward on Kickstarter for $1,199 — three hundred dollars more than the current OpenROV platform (the 2-series), but unlike that one, Trident comes assembled and ready to use out of the box.
In place of the Beaglebone Black and Arduino, it looks to have custom electronics. Some but not all of Trident’s elements will be made open, as Lang notes:
So far, we’ve released our entire 2-series OpenROV design as open source, and we’ve put a large effort into supporting people who want to use the design (or parts of it) for their own projects. Promoting innovation is what we care about, and for that reason we are making all broadly useful aspects of the Trident design open as well. This includes onboard OpenROV software, electronics, hardware specs, and other things that we think will fuel innovation and allow more people to explore. There are some aspects of Trident that we don’t think should be open source because they would not meaningfully contribute to innovation and are important for us to keep as value propositions for our business. Some of these things include our company’s financial information, enterprise software we develop internally, and some aspects of our mass manufacturing design and process.

Meanwhile, the 2-series will continue to be made available for assembly and for community modifications — such as this robot gripper add-on.
ADVERTISEMENT



