

(Maker Media 2015).
On sale now.” width=”180″ height=”180″> This project is excerpted from Making Simple Robots
(Maker Media 2015).
On sale now.
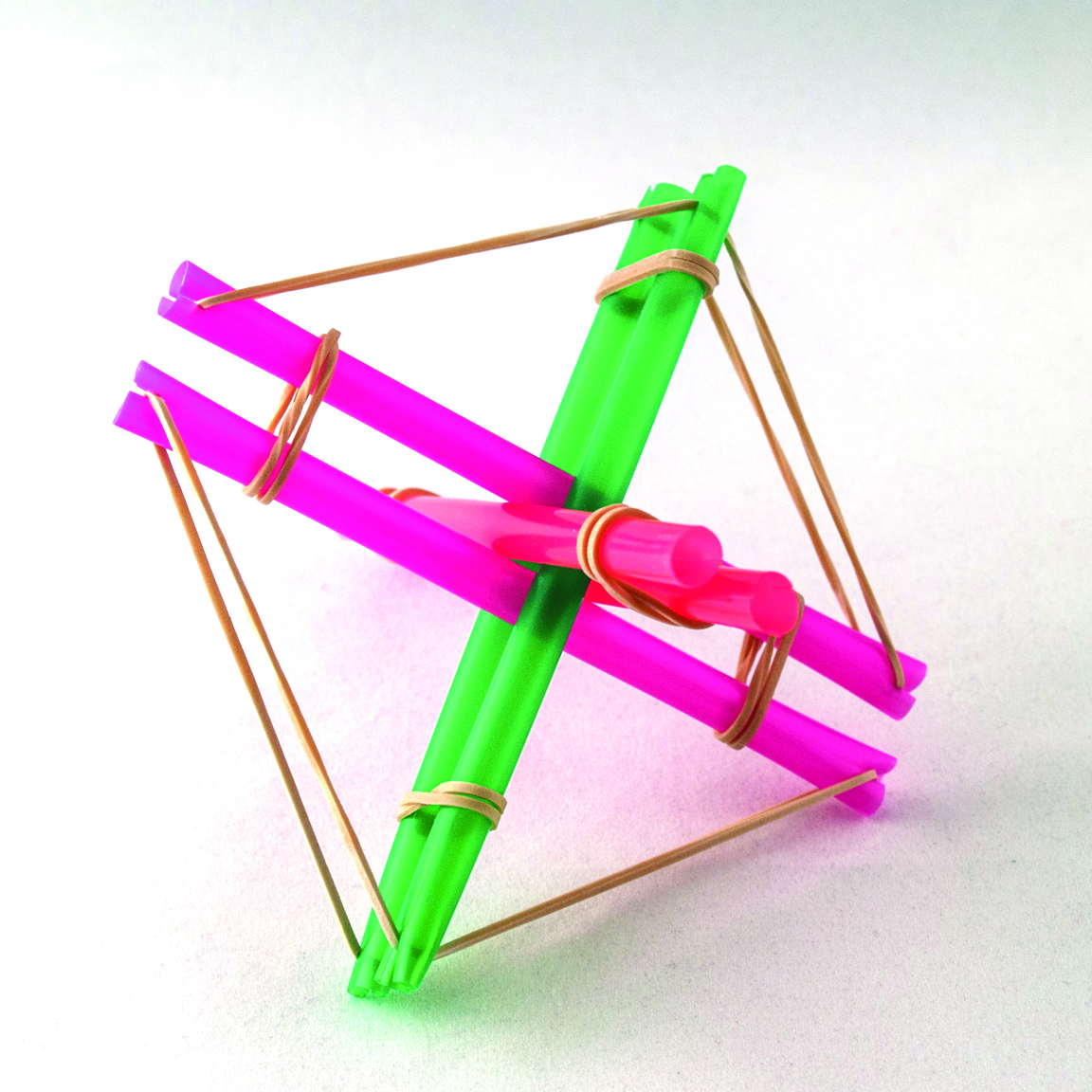
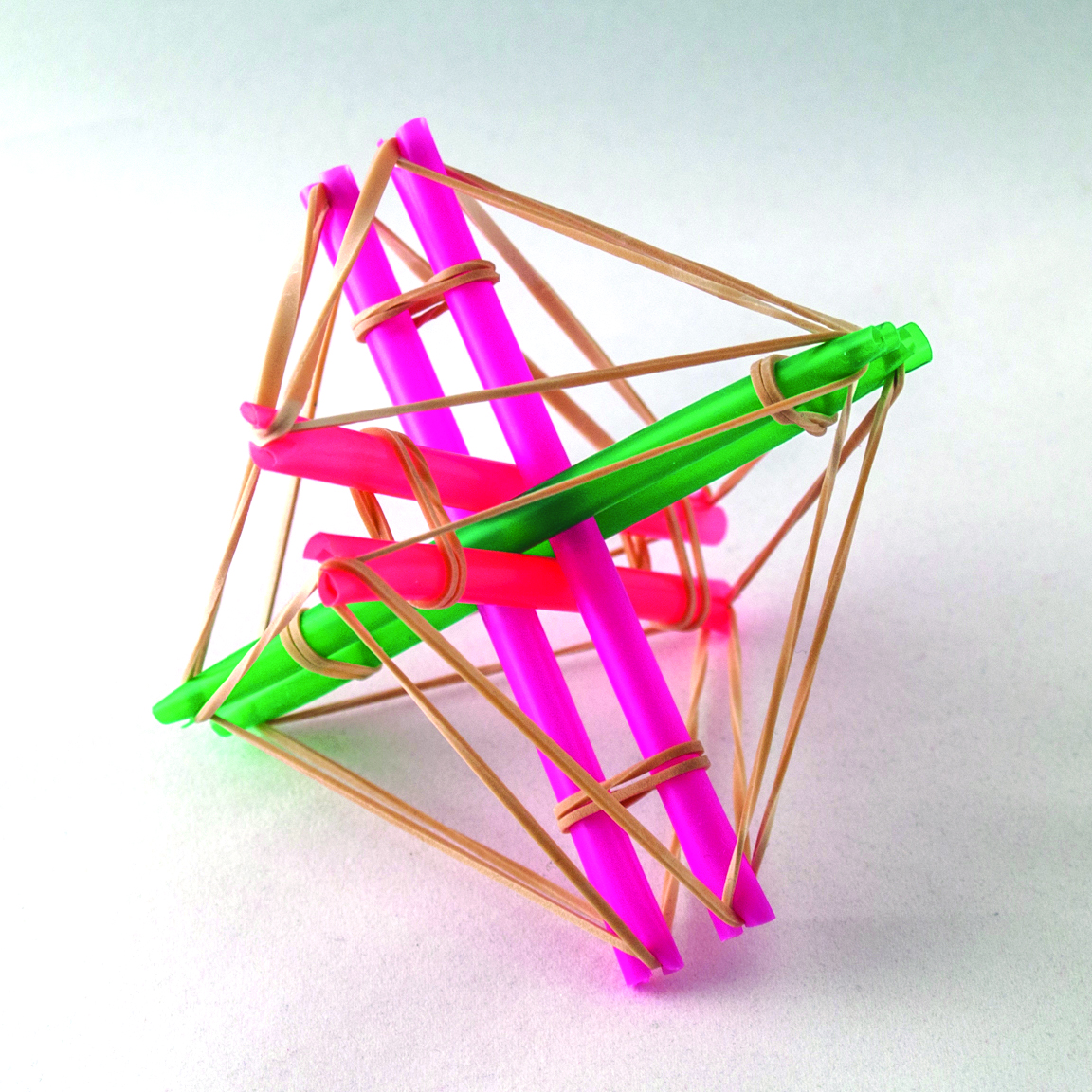
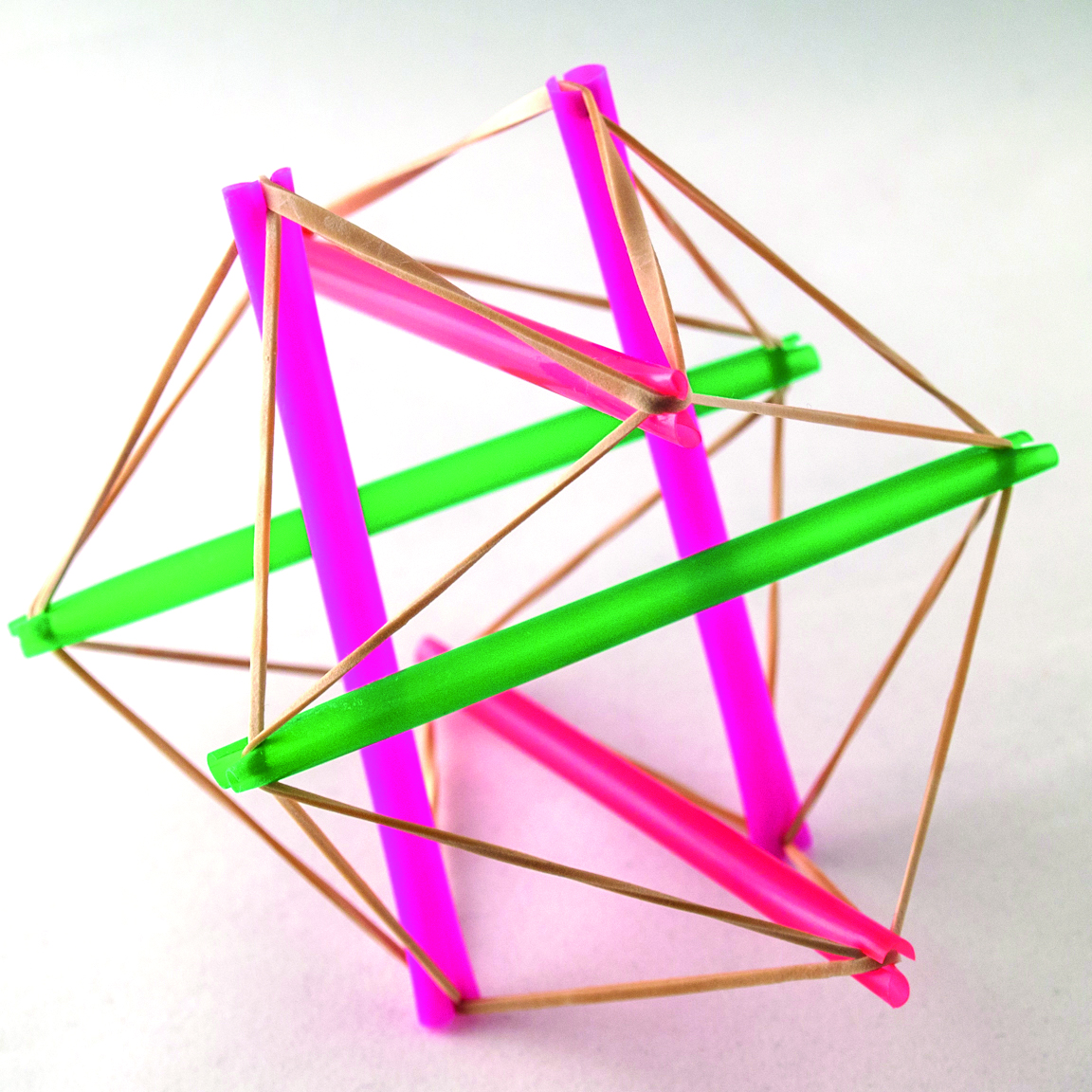
A tensegrity structure can flex, stretch, compress when dropped or pressed, and then spring back into shape. It also has a high degree of compliance, which means it won’t harm people or equipment around it. That, together with its resilience, makes tensegrity a useful framework for robots that need to withstand jolts or squeeze and twist themselves through irregular spaces.
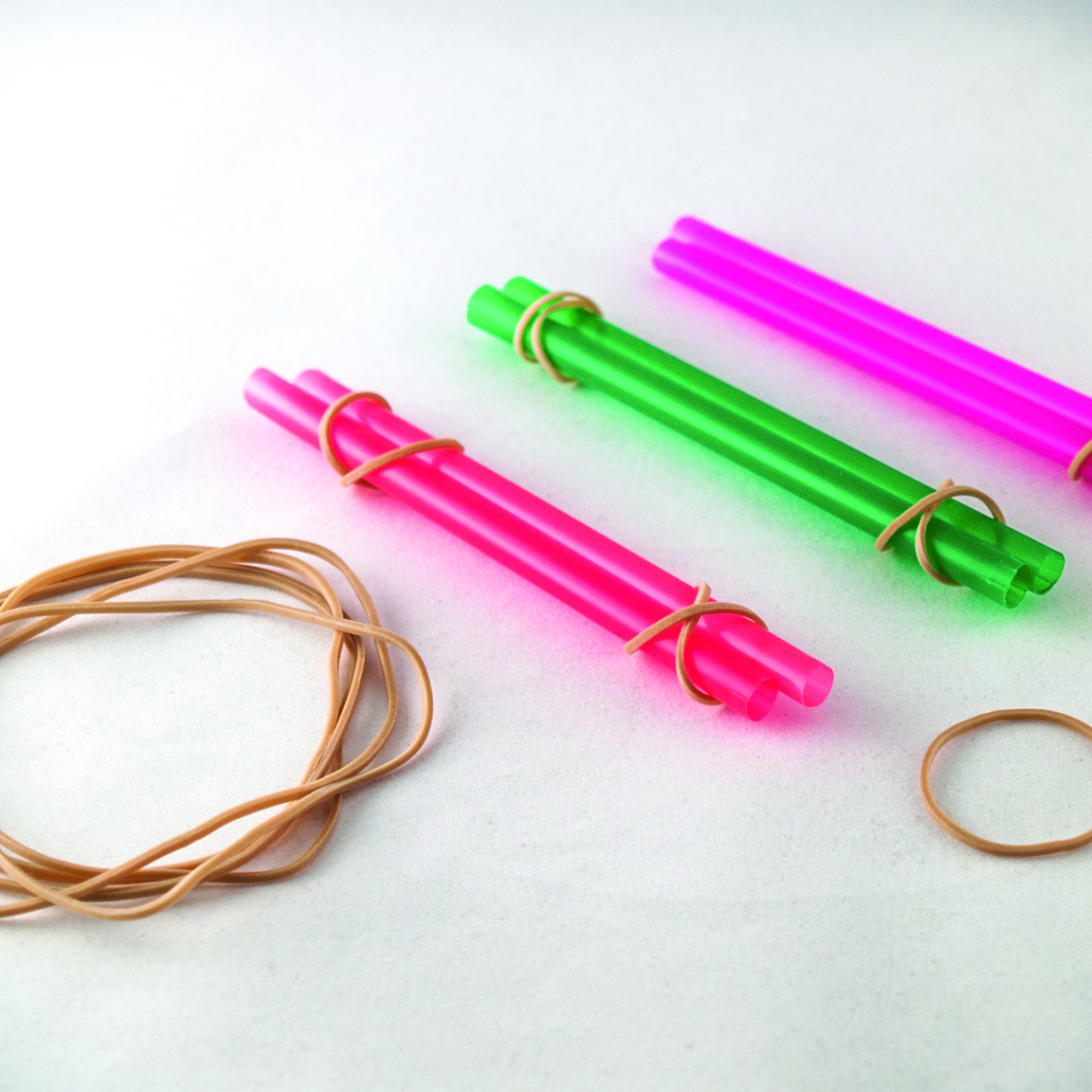
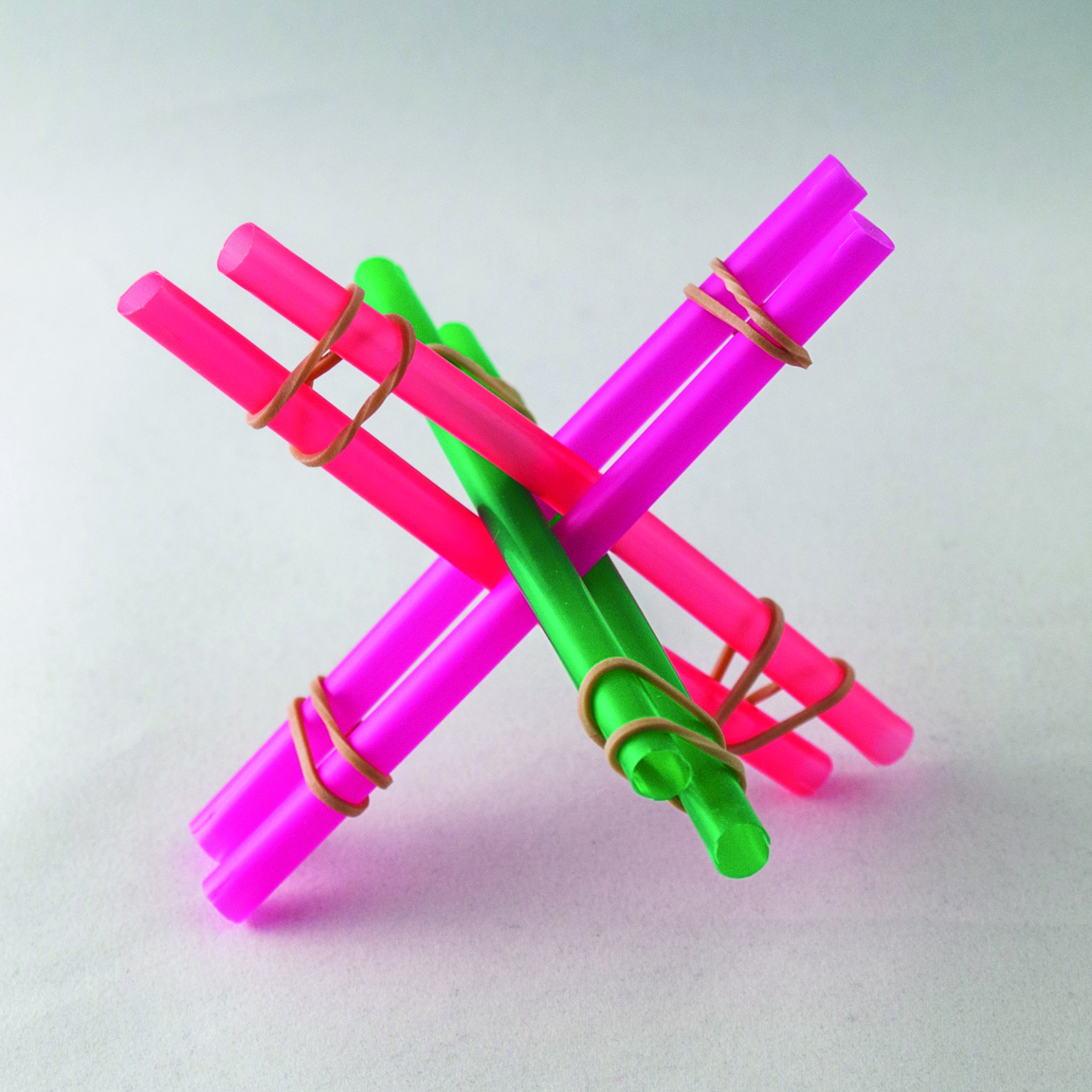
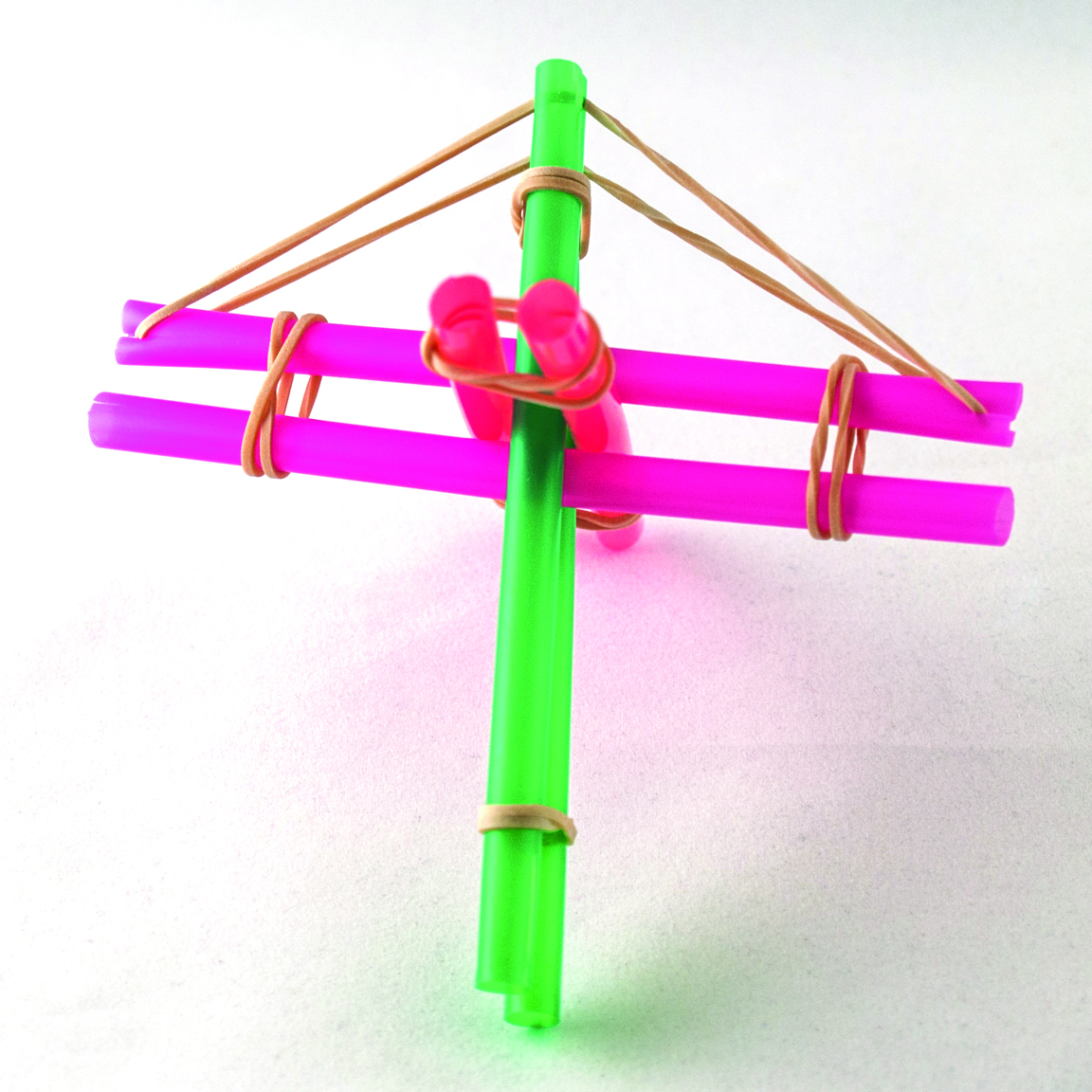
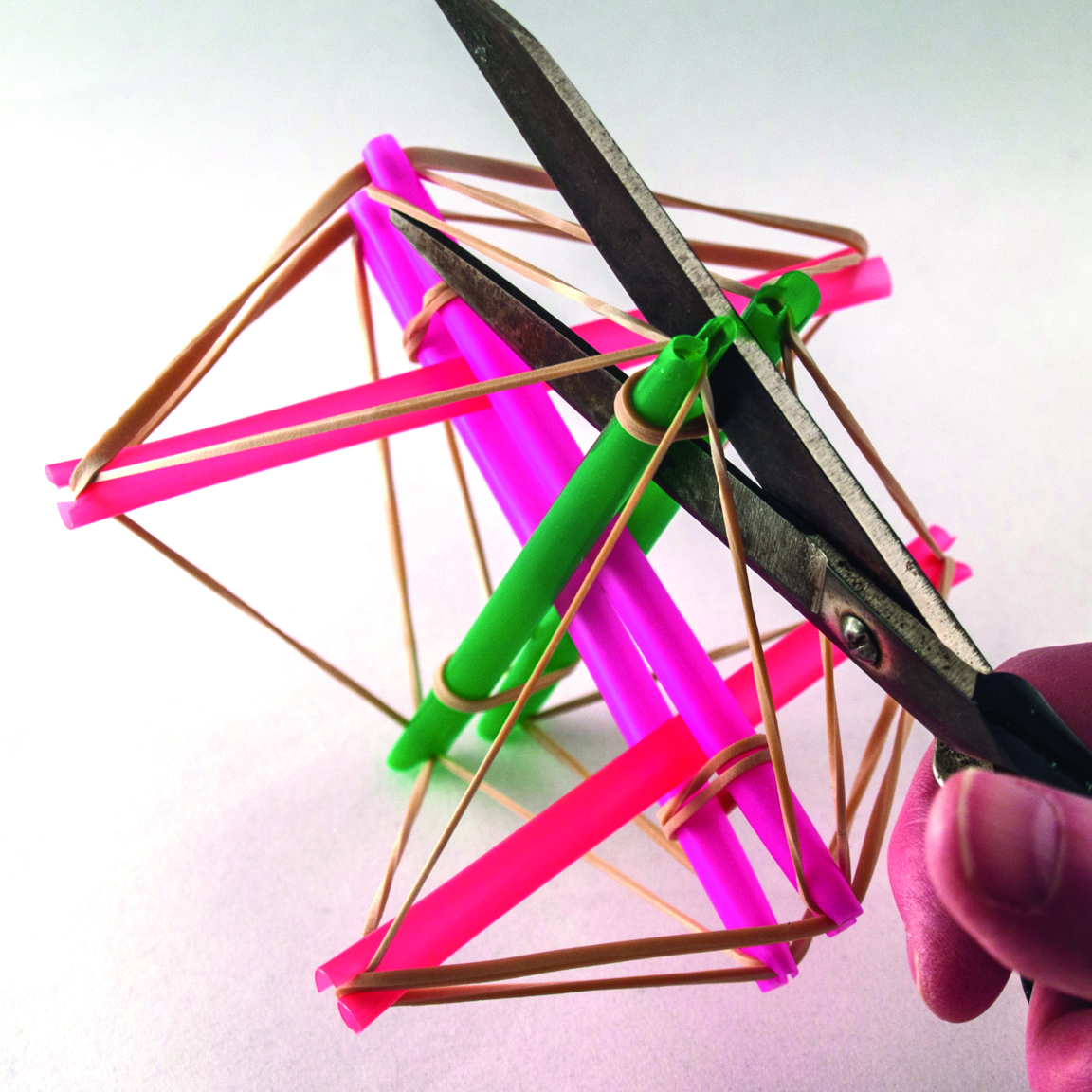
The directions for assembling this six-strut tensegrity structure out of drinking straws and rubber bands are based on a tensegrity icosahedron holiday ornament project from Bre Pettis that appeared on the Make: website in 2007.
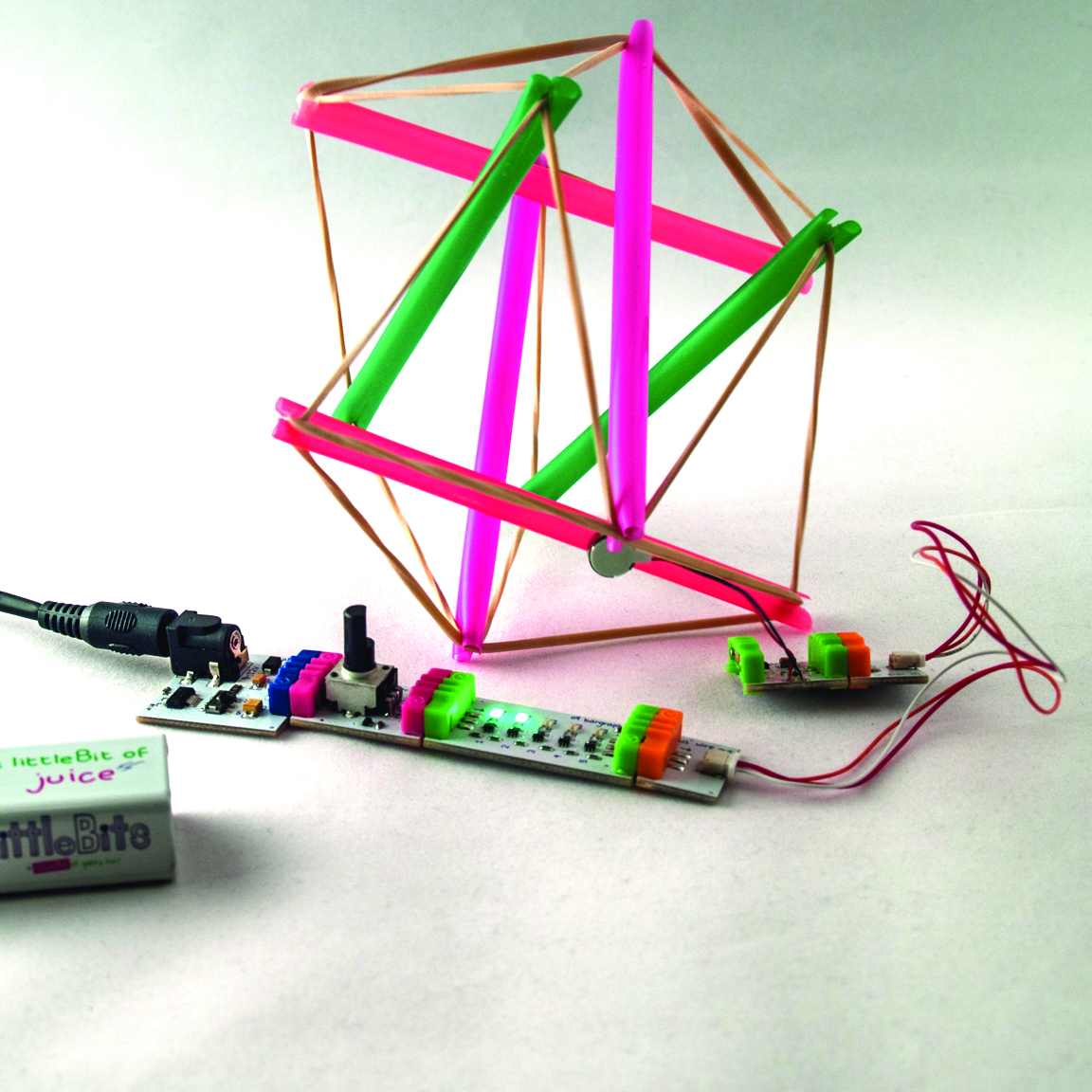
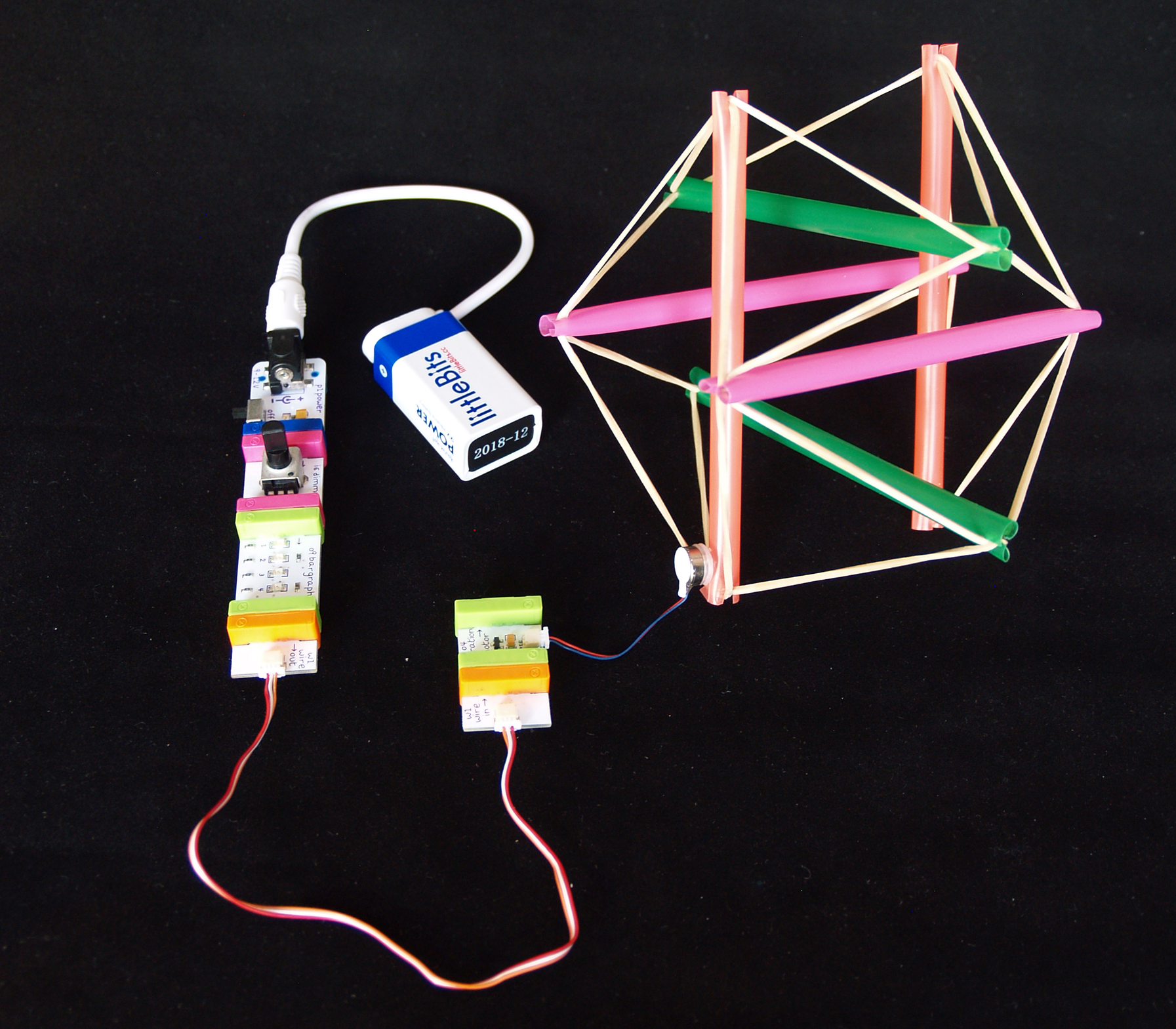
Once you’ve built your tensegrity structure, you can quickly put together a circuit to make your robot move using littleBits, electronic modules that snap together magnetically. The circuit consists of a tiny vibrating motor, a dimmer switch to make it run faster or slower, and a bar graph indicator that shows how much power you’re supplying to the motor. Attaching the motor to the tensegrity structure will make the structure vibrate and move across the table.
You can build your own Tensegrity Robot in less than an hour, and it’s a great project for kids. When you’re done, you can reuse the littleBits in other projects. If you already have the littleBits Base Kit, all you need to add is the vibration motor. If you buy all the modules separately, you’ll spend between $75–$100.