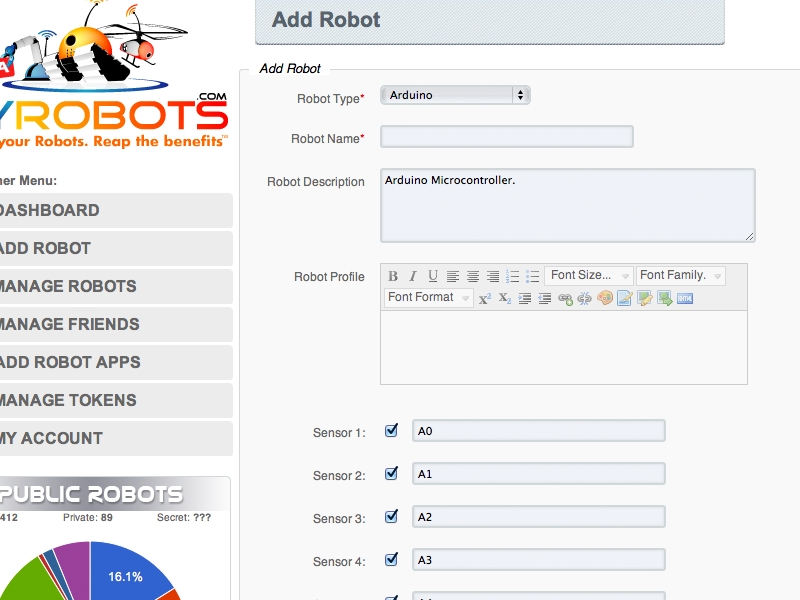
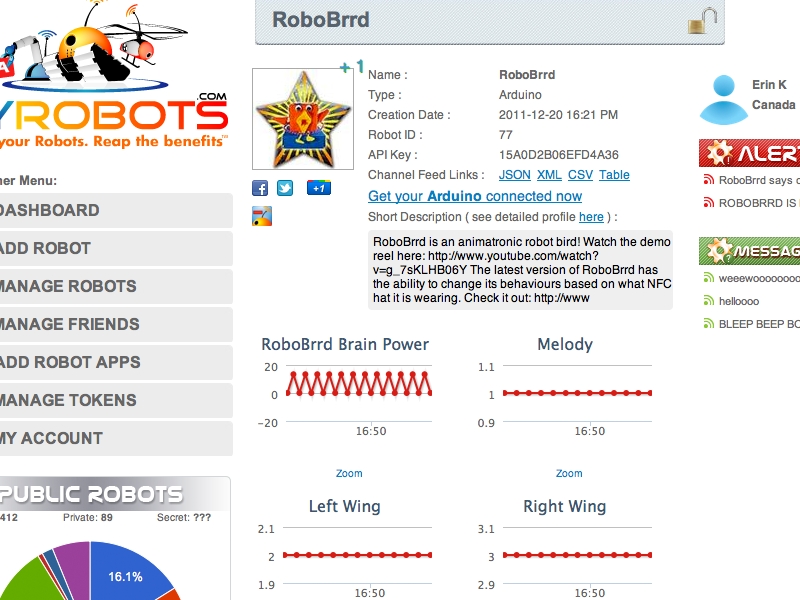
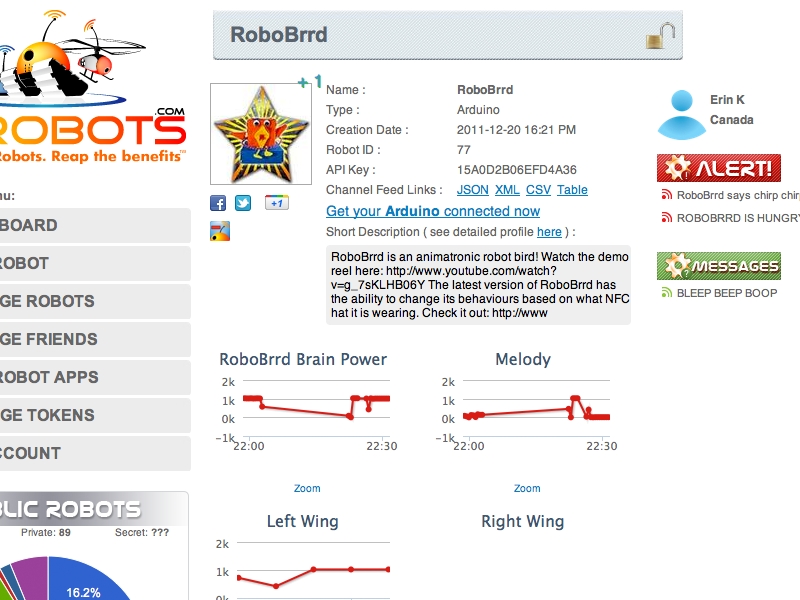
Time to let RoboBrrd soar into the clouds! OK, maybe metaphorically speaking. In this guide you will be able to connect any Arduino-compatible robot with MyRobots and update its sensor data!
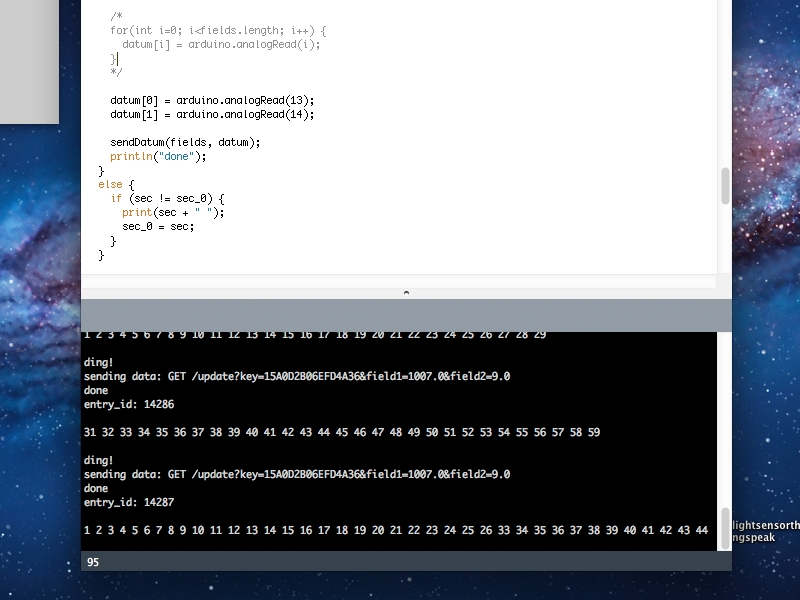
We will be using an Arduino and Processing to send your robot’s data to MyRobots. The data will be transferred through the USB cable via a serial connection, so your robot won’t need an onboard Internet connection.
The same process in this guide will work fine on any configuration of Arduino-compatible robots; you will just have to tweak what pins and what data to your specific needs.
To complete this guide you will need an:
- Internet connection
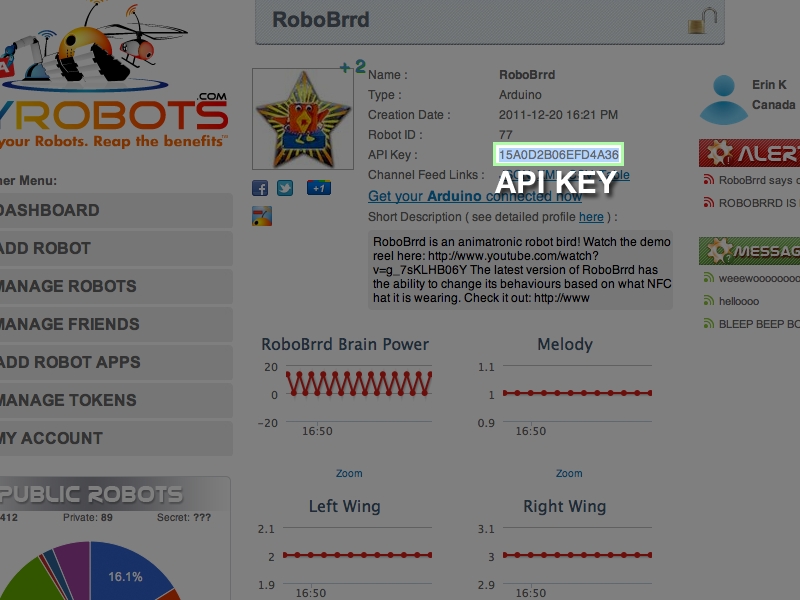
- Account on MyRobots
- Arduino (and preferably a robot)
Here are the resources we will use:
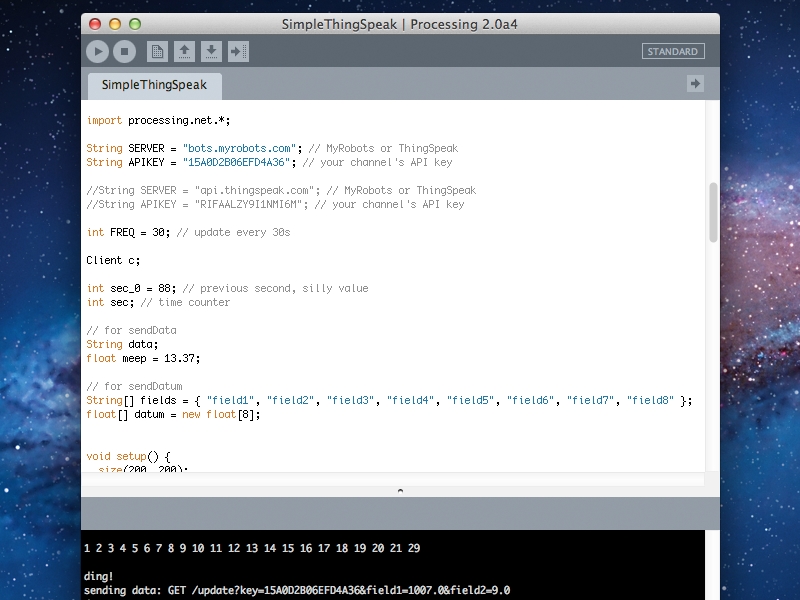
You can look at all the code for this guide on Github:
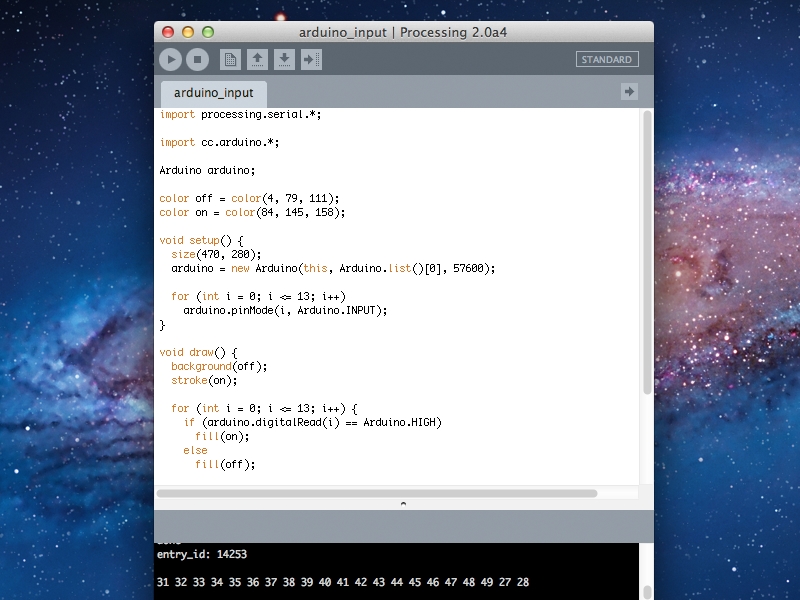
- SimpleThingSpeak (Processing)
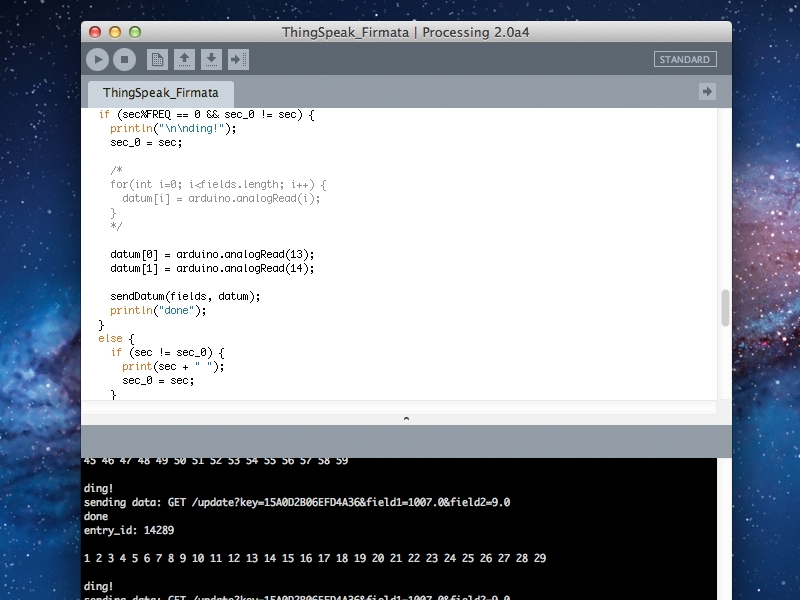
- ThingSpeak_Firmata (Processing)
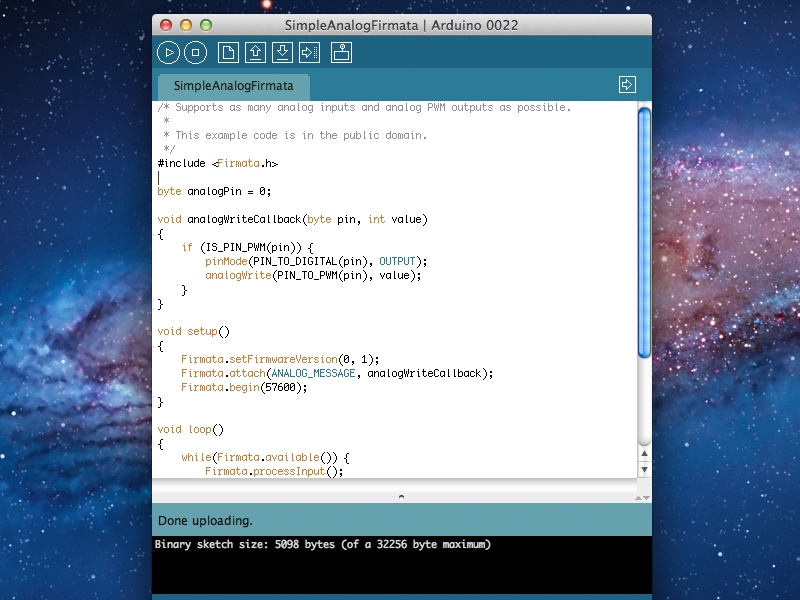
- LearningPet_AnalogFirmata_MyRobots (Arduino)
With that said, let’s get started!