


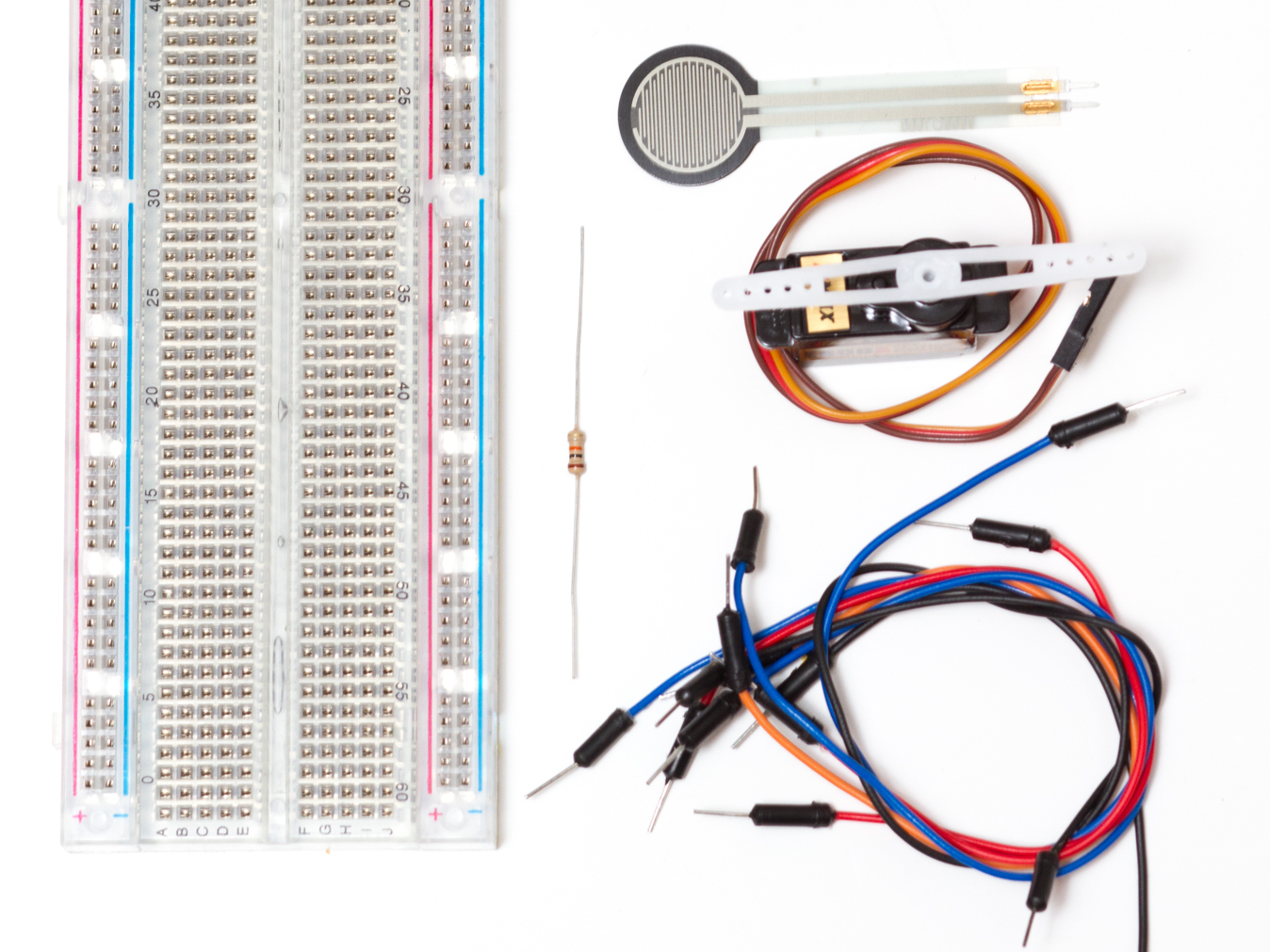
All required parts are included in the Maker Shed’s Ultimate Microcontroller Pack.
Projects from Make: Magazine
Control a Servo with a Force-Sensitive Resistor
This project is a simple introduction to Force-Sensitive Resistors. Once complete, the servo's position will depend on the force reading from the sensor.
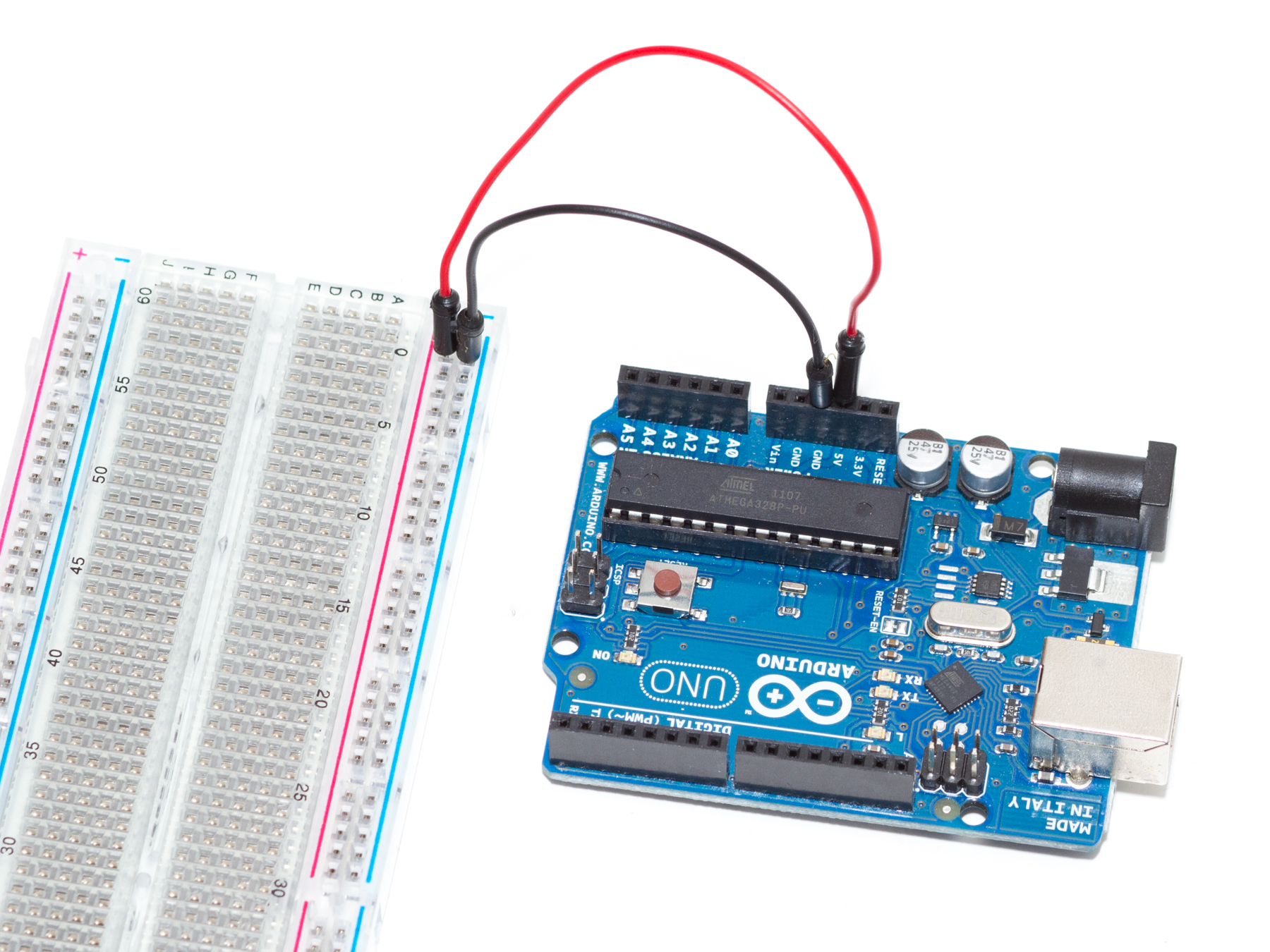
Start with the ground and power rails – use two jumpers to provide 5V to one rail (preferably the red one) and GND to the other.
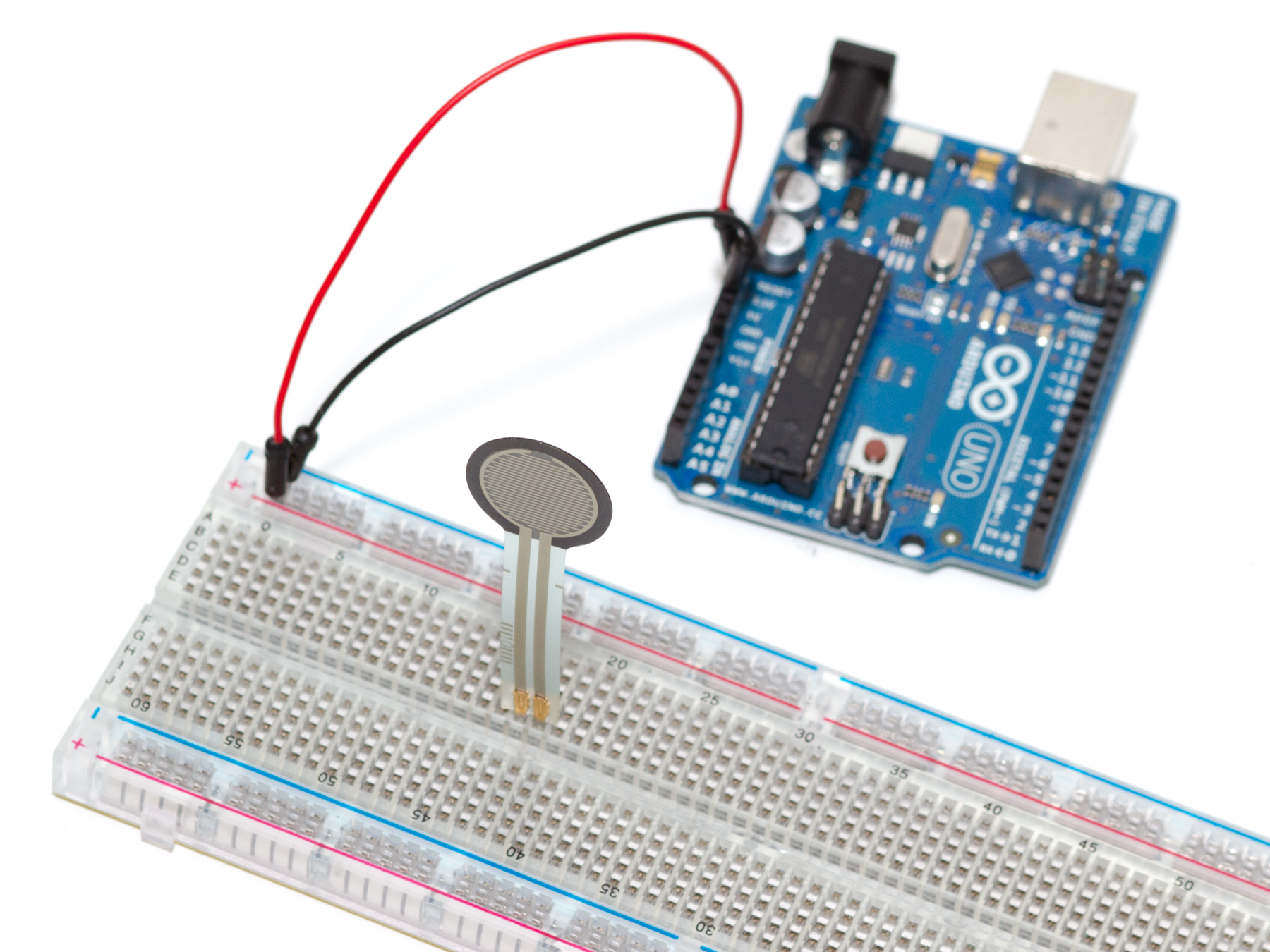
Now add the force-sensitive resistor (FSR) to the breadboard (E15 and E16). Polarity doesn’t matter here, so any orientation will work.
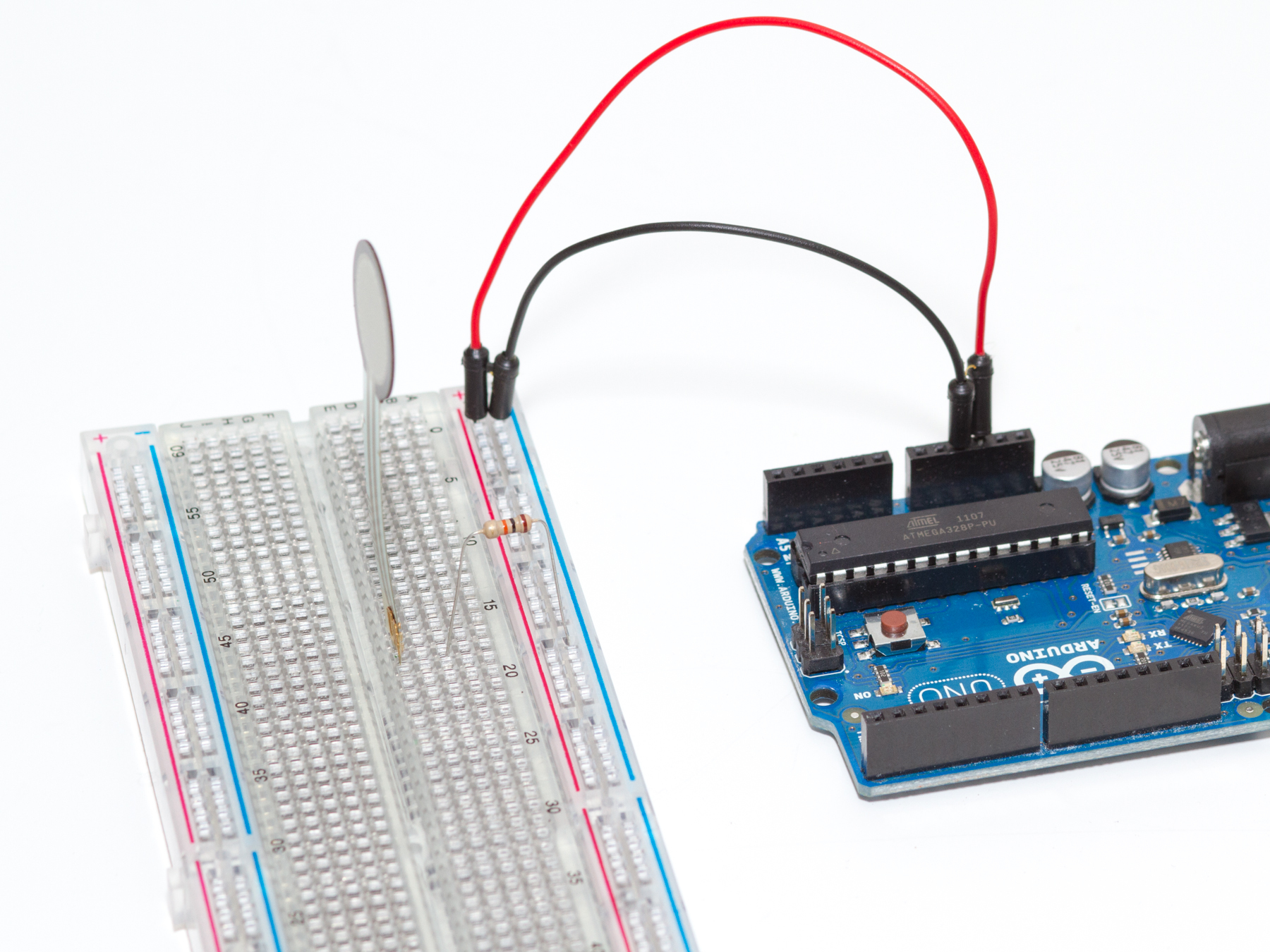
A 10kΩ pulldown resistor is needed to control current flow to the sensor. Wire it up between one side of the FSR (C16) and the GND rail on the breadboard.
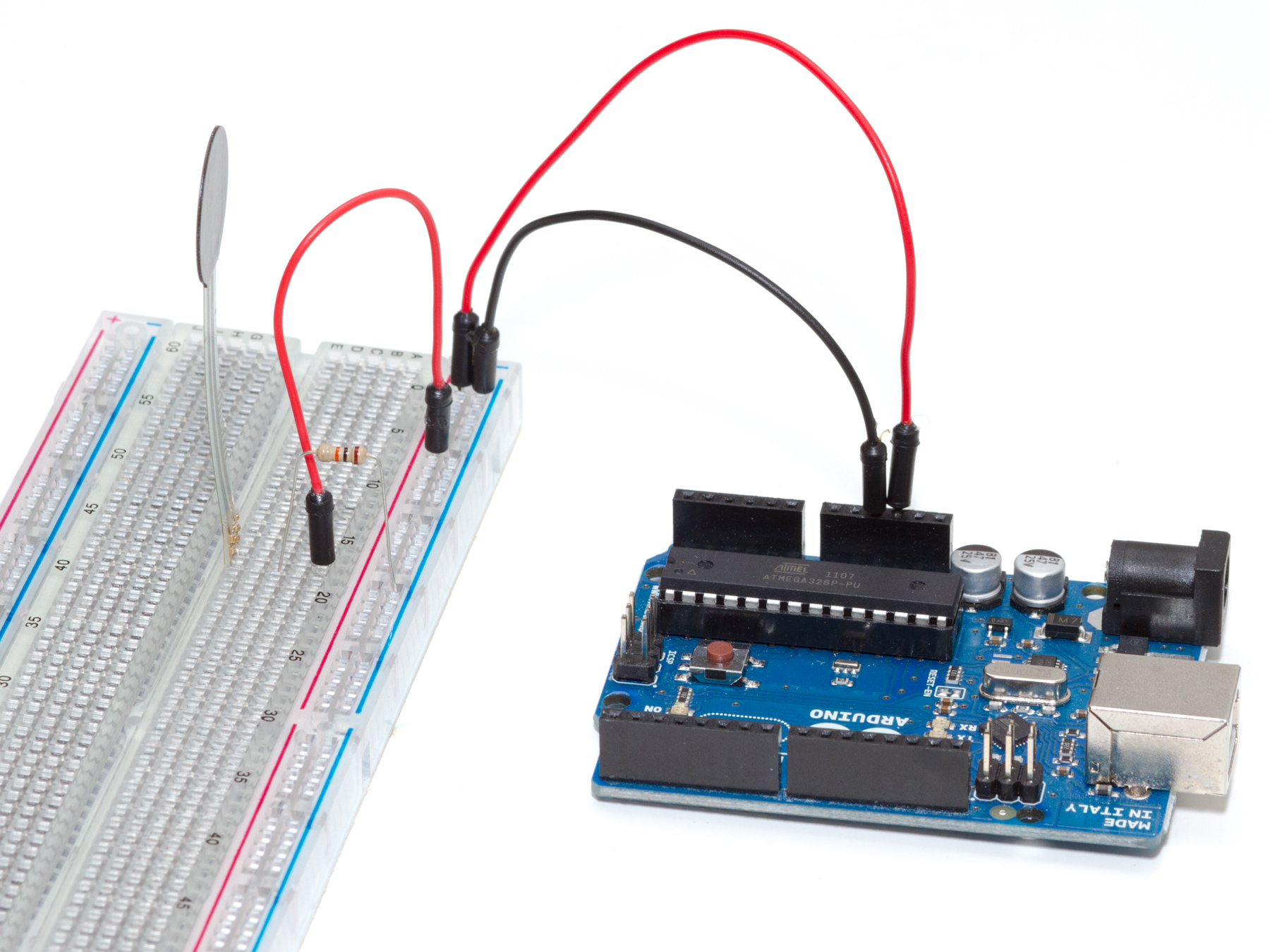
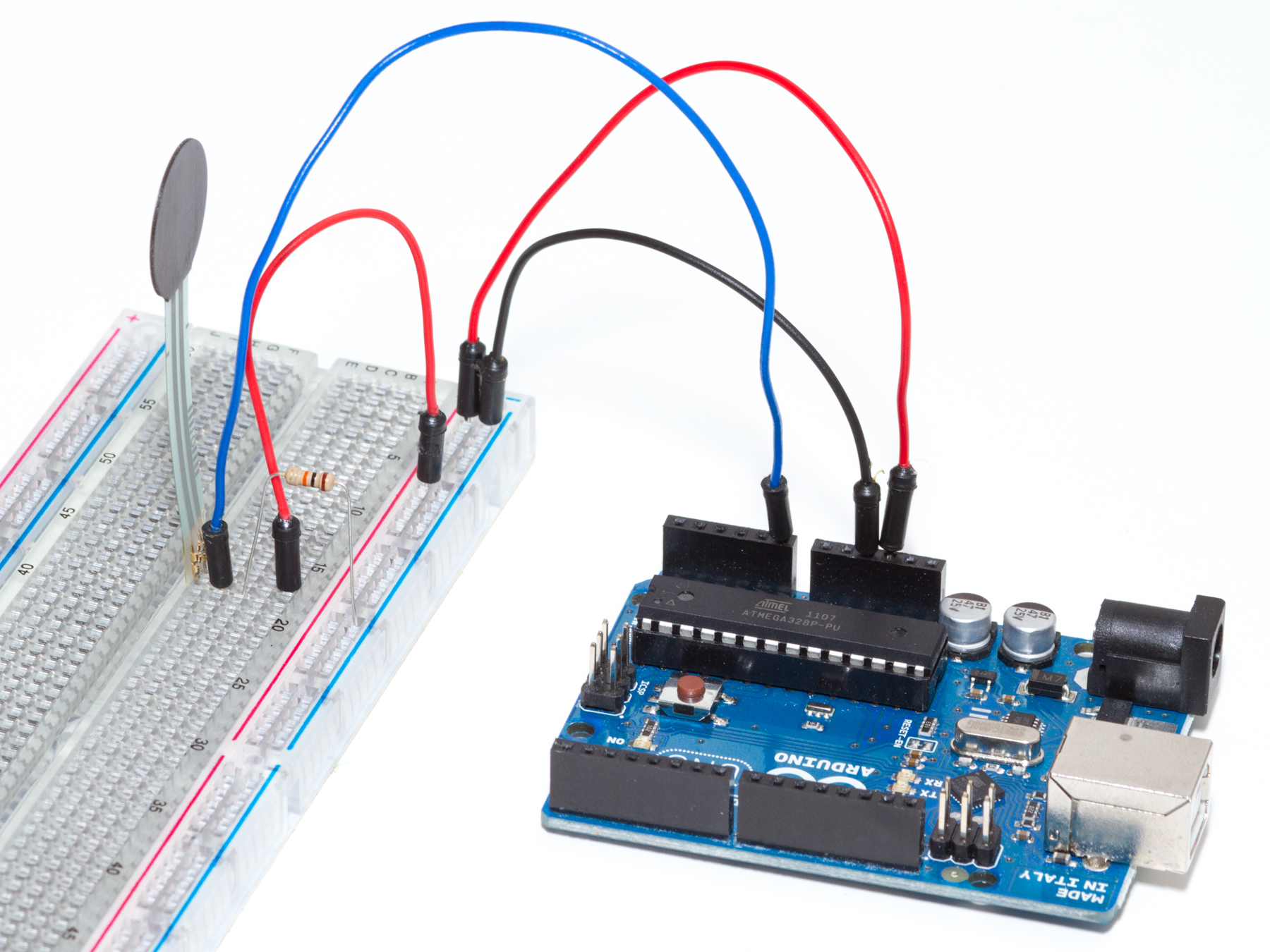
To provide power to the FSR, use a jumper wire to connect the side we haven’t wired up yet (A15) to the 5V rail on the breadboard.
Next, use a longer jumper wire to connect the FSR to the Arduino. In this case, analog pin A0 gets connected to the row with the 10kΩ resistor and GND jumper (D16).
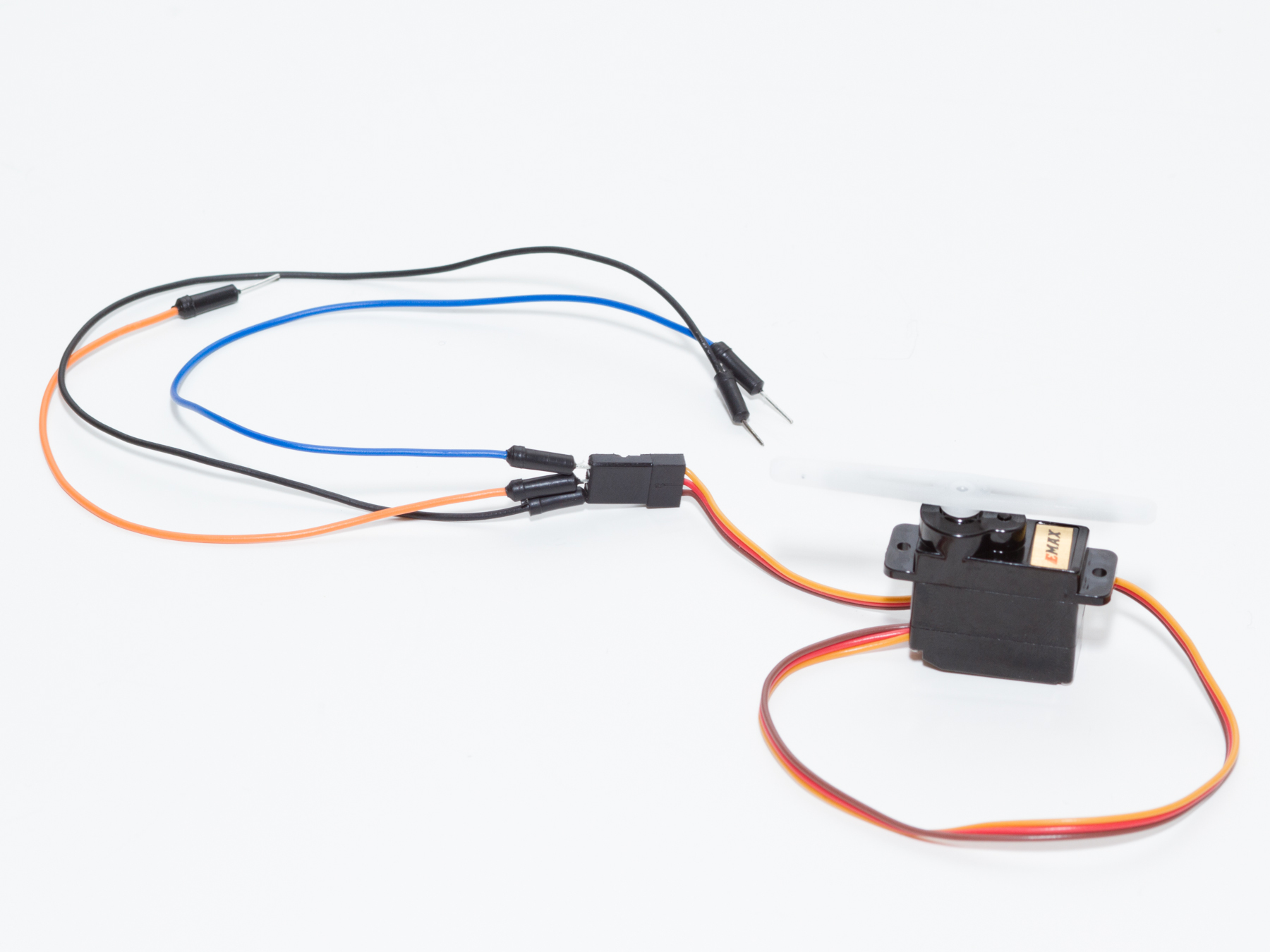

Now to connect the servo. Use three jumper wires to go between the servo’s female connectors and the breadboard. Try to match up the colors as best you can, to minimize confusion.
Hook up the PWR (red wire on the servo) to the 5V rail on the breadboard, GND (probably the brown wire on the servo) to the GND rail on the breadboard, and the signal wire (orange, in this case) to Digital Pin 9 on the Arduino.
Head over to GitHub to download the code (or copy-paste it right into the Arduino IDE), and experiment!





