


This project for me came about as just a step on my way to building a guitar. While most electronics in a guitar consist of basic, inexpensive components, a good pickup can be pricey. Its construction is also one of the biggest factors in how your electric guitar will ultimately sound. Building your own pickup is not only a fun learning project, but it also gives you the ability to fine tune the sound of your guitar and build your own unique tone.
A guitar pickup is an amazingly simple device that consists of wire wrapped around a magnet. There are of course an infinite number of combinations in how that can happen, but ultimately if you just manage to get a wire wrapped around a magnet enough times, you’ll have a pickup.
Fortunately, the pickup winder outlined in this project makes the basic process quite simple, freeing you up to experiment. Remember that a lot of the early distortion effects were based on sounds that happened when amps and speaker cones were damaged, so clearly doing things “the right way” is not necessarily what is going to give you the sound that you want.

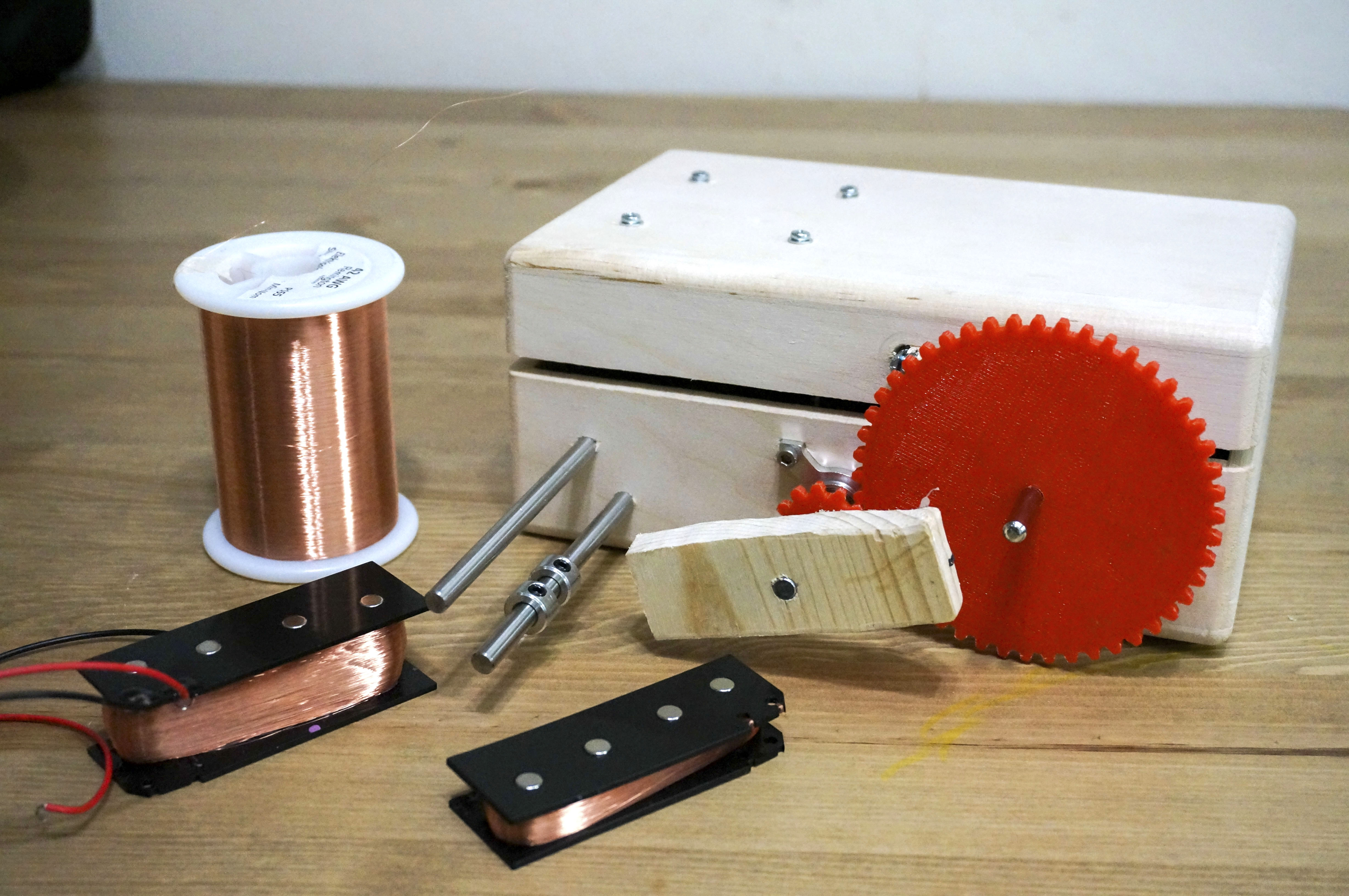
Please note the gears required for this project. I could not find pre-made gears big enough to use with the counter, so I created my own. I’ve uploaded files for 3D printing and laser cutting. For my first test, I laser cut gears from acetal. The version shown here is 3D printed. Both worked fine. You can also use a sprocket and chain set, available at Servocity. Just needs to be a 0.25:1 gear ratio, the counter moves at ¼ speed.
The counter has a max speed of 350 RPM, so you could potentially use up to a 1400 RPM motor with this same setup. If you would like it to go faster, I would suggest using a chain and sprockets, available from Servocity. They have a broad range of gear ratios available, enabling up to around 2100 RPM motors to be used.
Using your Pickup Winder
For attaching the pickup, I used a thin double sided tape that I had sitting around from repairing screens on a cell phone. It worked reasonably well, though I think maybe a bit thicker of tape would be better. There is also a putty that is used for pickup winding, though I have not tried it.

When you begin winding, start with the collars very well within the limits of your bobbin. Do the winding slowly at first, moving the wire to the edges of both collars. You’ll probably have to pause and adjust the collars out a couple times before you get it to fill the bobbin properly. Make sure that you don’t go too far, a bit of empty space at the edge will end up getting filled from jitter, but it just takes a fraction of a second of the wire going past the edge to mess up your coil.
Before winding, thoroughly wash and dry your hands. Any bit of moisture or anything on your hands can get the wire caught enough to snap as it gets pulled through. You should also start with a practice bobbin — the first few times you’ll need to figure out how much tension to apply and how far the collars need to be adjusted.
If you would like to reduce cost of the build, a few parts can be changed or omitted. The PWM controller is helpful, but it can function without. Also the counter and gears are helpful, but you can also omit them and just monitor DC resistance as you wind. The box I used fits pretty well, but just a bit of hobby wood from a hardware store would be cheaper and could be cut to fit.




























