

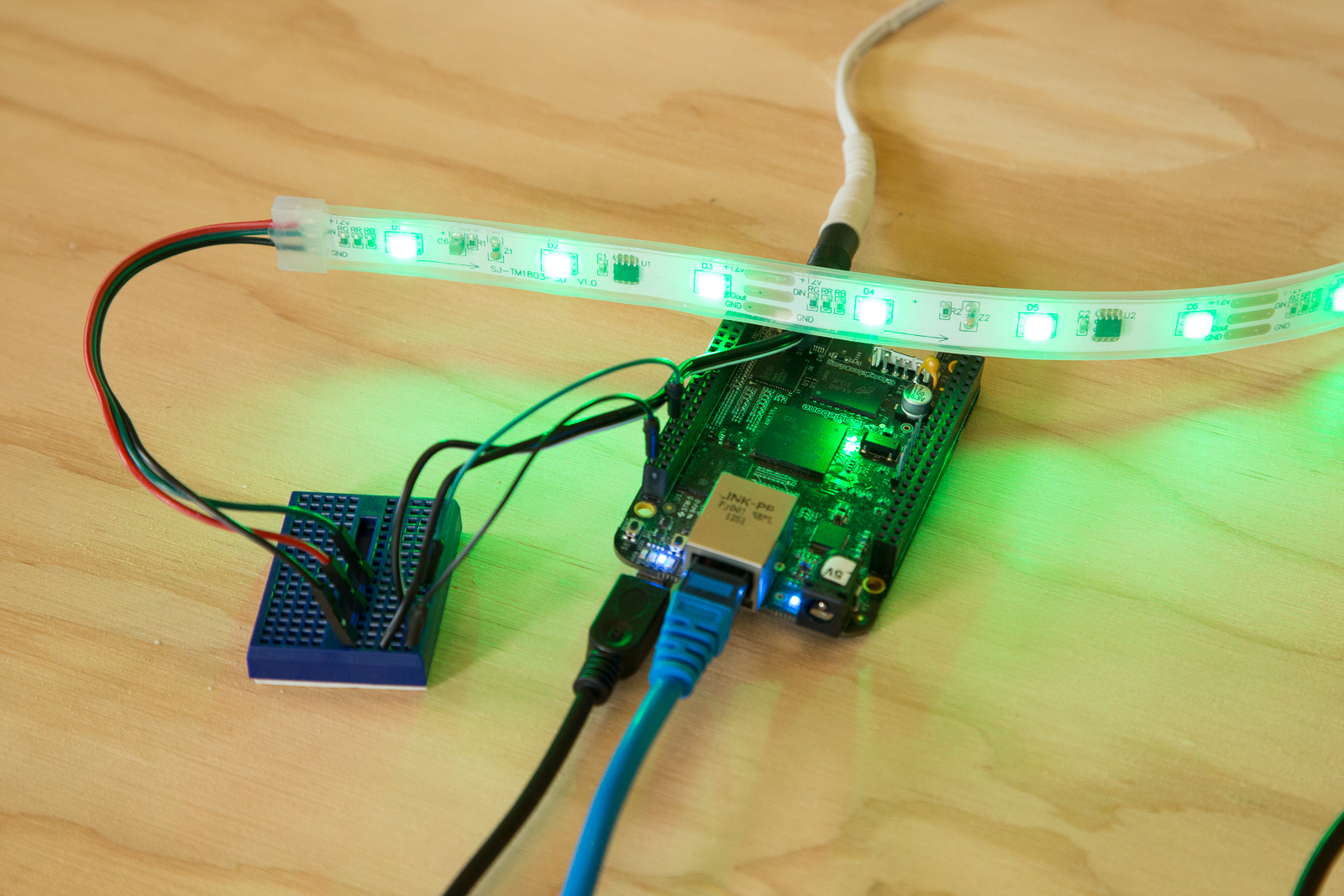
Monitoring network and internet speeds can be a major concern, especially in the case of LAN parties or video streaming. Modern Operating Systems provide utilities to track all the bits and bytes that pass over a network connection, but typically these tools lack obvious visualization. That’s where the Internet Speedometer can help. Using a BeagleBone Black and the power of its two Programable Realtime Units (PRUs), the Internet Speedometer will not only test download times, but also output the speed results visually to the tricolor LED strip.
But what are PRUs and why use them? PRUs are quite possibly the coolest feature of the BeagleBone Black, and one that sets it apart from other single board computers. They function much like microcontrollers; however, the two PRU cores on the BeagleBone Black operate at 200mhz with instructions executing on them at a fixed time of 5NS. That’s fast! What’s more is this speed does not come at a cost to the main processor’s load. Applications run in Linux will not take a performance hit even if there is high PRU activity. The two cores are not completely isolated and can share data between themselves and the CPU making interoperation possible. Programming of the cores is done using assembler in Linux and the execution of code is started by the main CPU. And this sharing of data and signaling features enable clever developers to offload work from the main processor and parallelize their applications. The result is a BeagleBone Black can perform high speed I/O with no performance hit to user experience — other boards simply don’t have this combination.

NOTE: Recently the BeagleBone Black switched Linux distributions from Ångström to Debian, and to anticipate this the Internet Speedometer uses Debian. If your BeagleBone Black is not a Rev C. or is not running Debian, consult our guides for Installing Debian on the BeagleBone Black (for OSX and Windows users).