This project is based on work by MAKE magazine contributor Tom Zimmerman. Tom, who was honored in 2009 as California’s Volunteer of the Year for his unpaid teaching campaign in public schools, developed the idea as a hands-on activity to accompany his talks about the Mars rover program. Basically, he mounted an X10 wireless surveillance camera on a small R/C car frame, fixed some magnets to the front bumper, and challenged students to drive the vehicle around remotely and pick up scattered tin cans with the magnets.
That project was published as “Mini Mars Rover” in MAKE Volume 06, back in 2006. The X10 XCAM2 wireless video camera specified in Tom’s original build was one of the first small, inexpensive CMO-based 2.4 GHz wireless surveillance cameras marketed for home use. It has a maximum resolution of 510×492, and no onboard battery. Students who play with the project, Tom says, “soon find out that driving is a lot harder when their field of vision is as narrow as a video camera’s.” At the end of his article, Tom suggests several improvements for the ROV, including making your own battery pack (to save on the expense of buying a commercial one), adding a second camera (for back-up or front-bumper views), and adding onboard lights (for nighttime or low-light conditions).
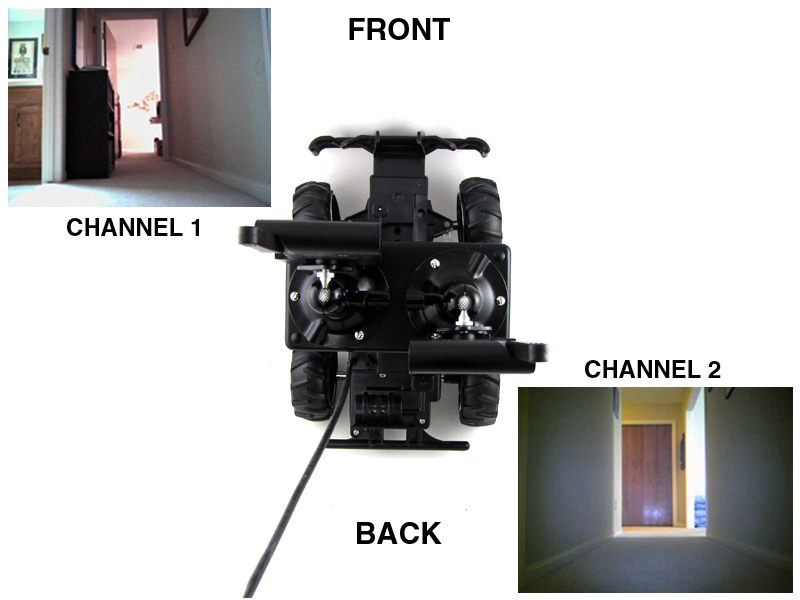
Wireless video technology has come a long way since 2006, and we felt like it was time for a reboot. After shopping around, we homed in on Uniden’s UDW10003 wireless surveillance system, which consists of a small handheld receiver unit and a bundled UDWC23 wireless camera. This camera sports VGA resolution of 640×480, onboard audio as well as video, an integral lithium-polymer rechargeable battery, and a “night vision” mode with a built-in solid state IR illuminator that automatically kicks in under low-light conditions.
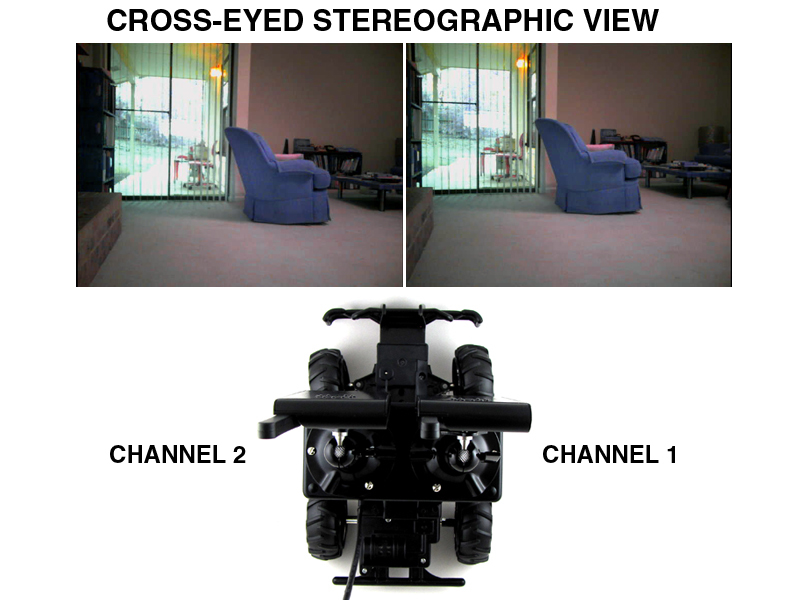
The receiver can handle up to four cameras simultaneously, and includes an RCA A/V out for direct connection to a display unit, and a USB port for serial communication with a computer. It can cycle between active cameras on command, or on a timer, and includes a “quad view” mode that arranges all four channel feeds on the screen at once. Besides the switchable front and back views suggested in Tom’s article, this simultaneous side-by-side viewing mode opens up some interesting new multiple-camera possibilities, including stereoscopic 3D!