Last year we ran a cool CoasterBot build project and contest on MAKE. We had dozens of awesome entries, from the most basic to the quite elaborate. This Make: Project shows you how to make just about the simplest CoasterBot imaginable. From here you can add new sensors and features and build on the basic bot-building knowledge you learn in this project.
Projects from Make: Magazine
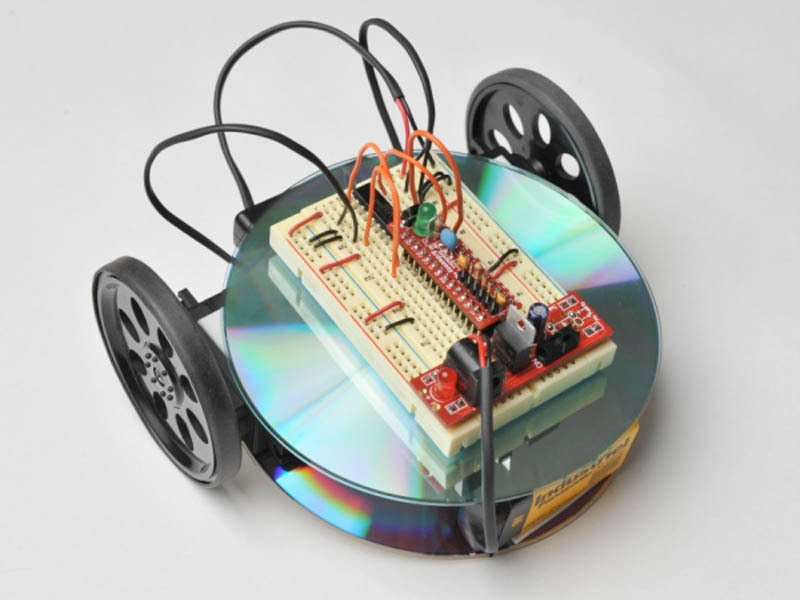
One-Hour CoasterBot
Build a basic programmable robot experimentation platform in about an hour, using a tiny Arduino clone, some hacked servomotors, and a couple of dead CDs (aka "coasters").