I am descended from 5,000 generations of tool-using primates. Also, I went to college and stuff. I am a long-time contributor to MAKE magazine and makezine.com. My work has also appeared in ReadyMade, c't – Magazin für Computertechnik, and The Wall Street Journal.
This part covers installation and wiring of the electronics that control the printer. First, the Arduino and attached RAMP shield are mounted on the printer frame. Second, connections from the build platform wiring harness, the extruder wiring harness, and other components are clipped to the PCB. Finally, the power supplies are connected, and formal assembly of the printer is complete.
Project Steps
Tie PCBs to mounting plate
Your Mosaic kit will probably arrive with the RAMP shield pre-installed on the Arduino Mega. If not, however, install the shield before proceeding.
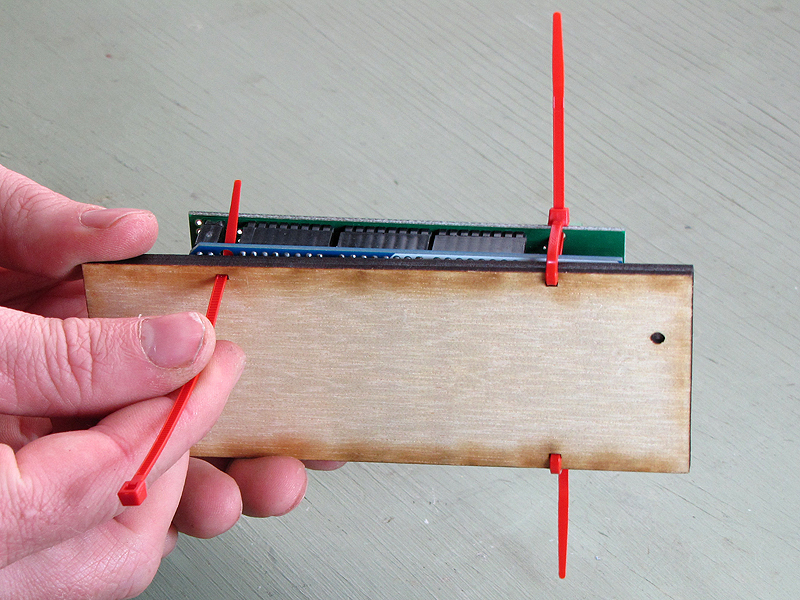
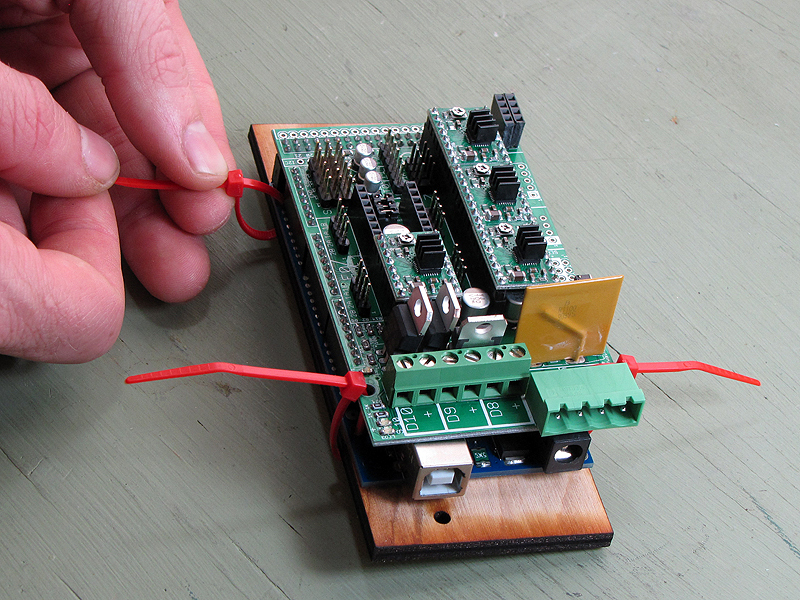
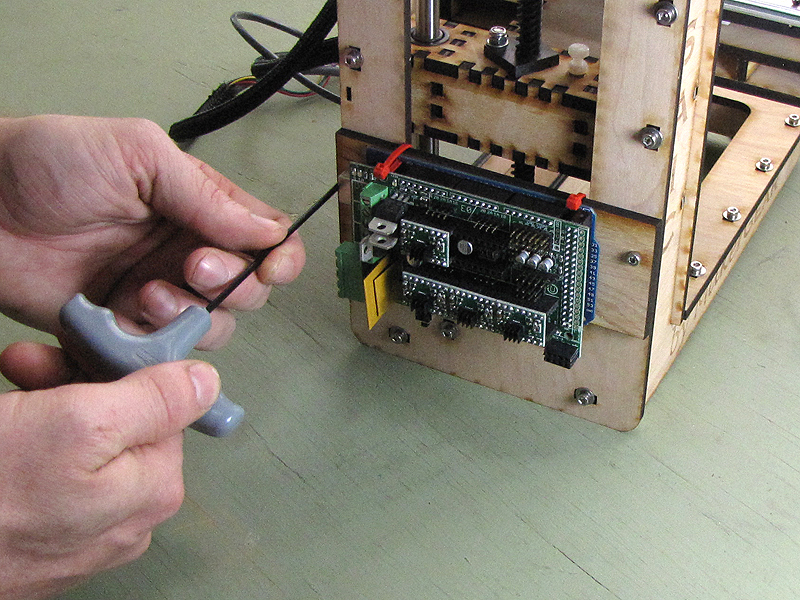
Align the three small slits in the plywood mounting plate with the mounting holes in the RAMPS and/or Mega PCBs, as shown,
Pass each of three cable ties through one of the slits in the mounting plate, through the corresponding mounting hole in the lower PCB (the Arduino), and, finally, through the corresponding mounting hole (if present) in the RAMP shield.
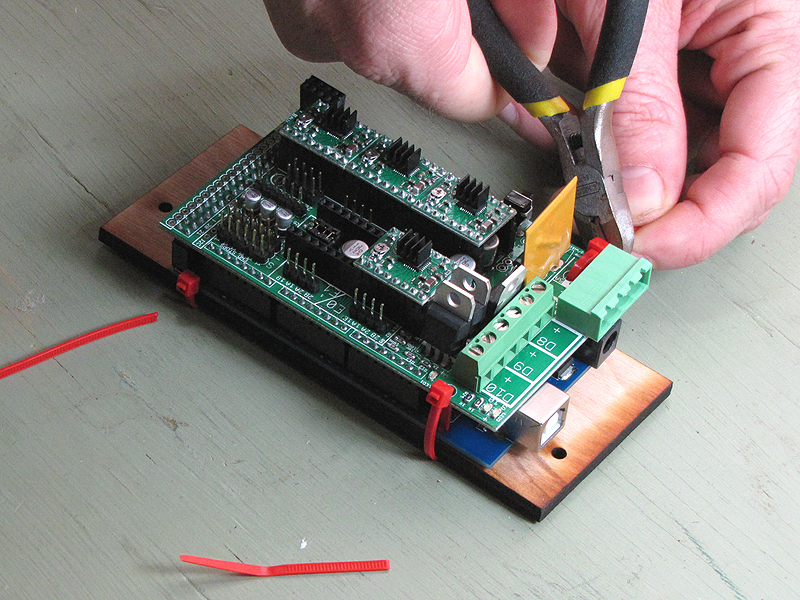
Cinch down the cable ties gently, but firmly, and cut off the extra from each tie with a pair of side-cutting pliers.
Attach mounting plate to frame
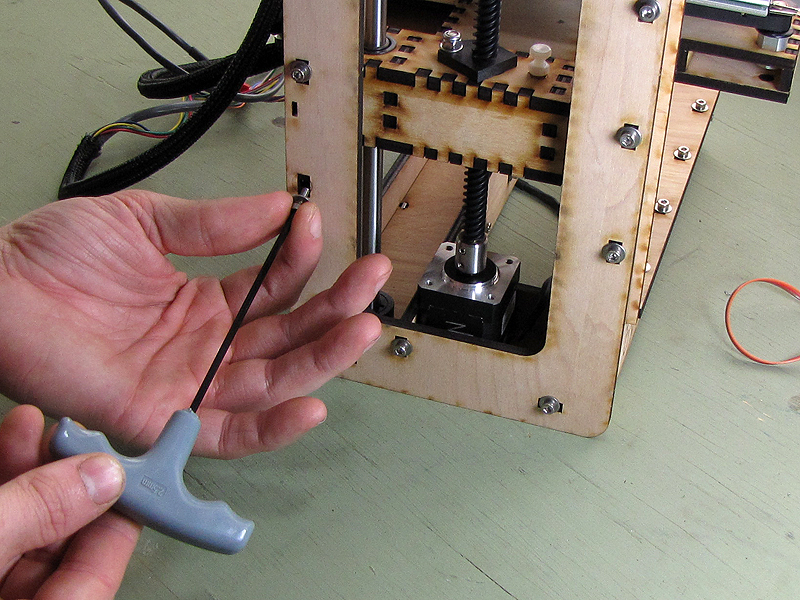
Use a 2.5mm hex wrench to remove two M3x10mm socket cap bolts from the printer frame, as shown in the photo. Remove the washer from each screw. The screws themselves should be preserved as spare parts, but will not be needed again in the assembly of the printer.
Run each of two M3x14mm socket cap bolts through one of the washers you just removed, then through one of the round holes at either end of the electronics mounting plate, and finally into the corresponding captive nuts behind frame section I. Turn them down with the 2.5mm hex wrench, but be careful, as always, not to overtighten.
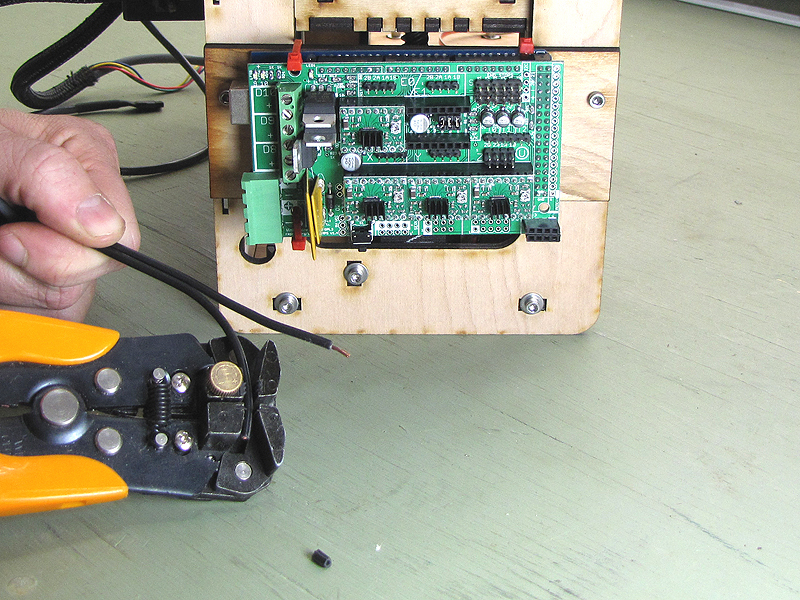
Locate the platform heater power leads in the build platform wiring harness. Separate the leads for about two inches from the cut end, and strip about 1/4″ of the insulation from each.
Build platform connections
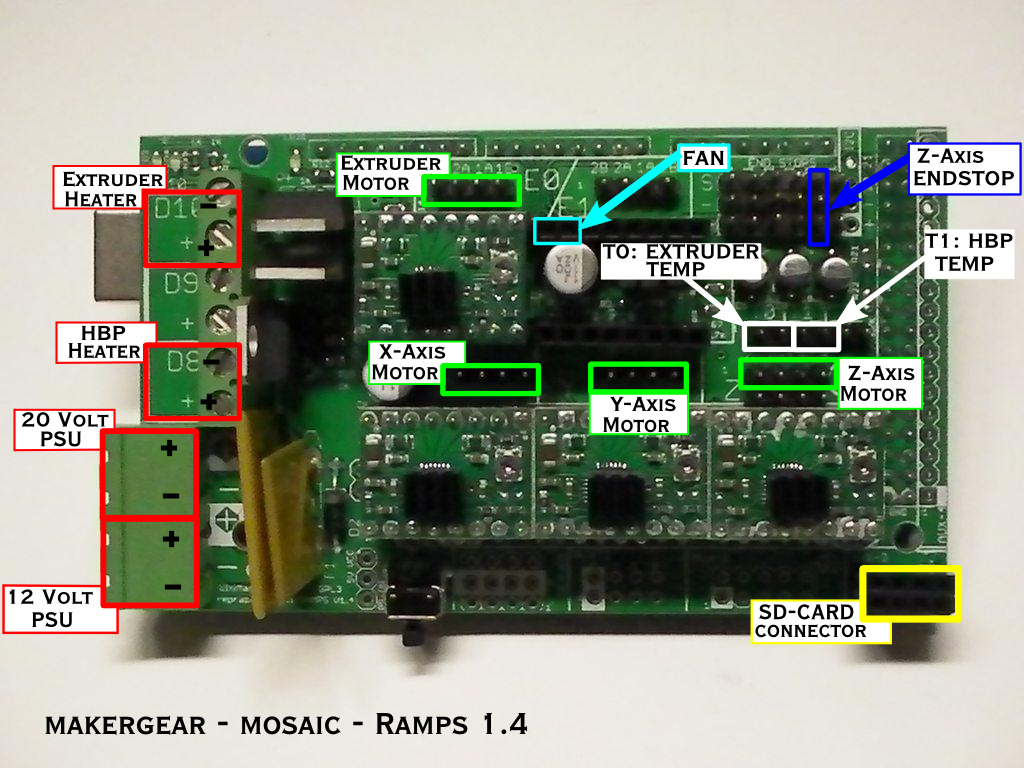
When making connections to the PCBs, it will be very helpful to refer to the diagrams in the PDF attached to this project.
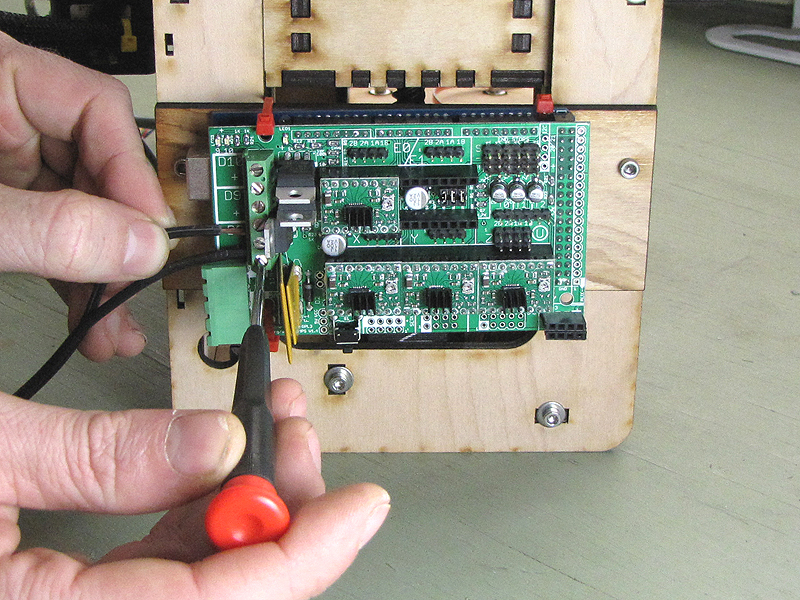
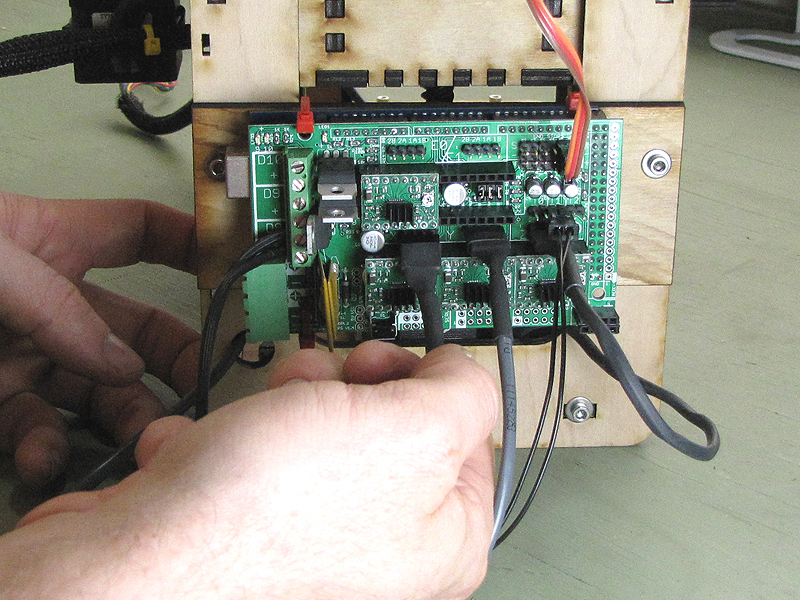
Loosen the screw in each of two terminals D8 in the terminal block in the upper left corner of the RAMPS PCB, as pictured. Insert each of the two build platform heater power leads you just stripped into one of these terminals. The heater is not polarized, so it does not matter which of the two wires goes into which of the two terminals D8. Tighten the screws back down to secure the leads.
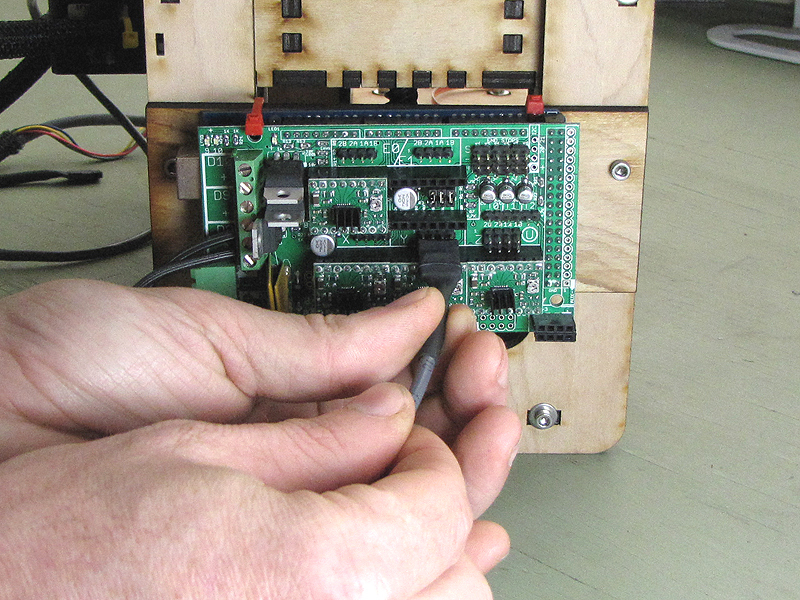
Find the 1×4 socket Y-axis stepper motor cable connector, and plug it into the center 1×4 pin header block, as shown. The connector can be reversed later, if it turns out the Y-axis motor is turning the wrong way. For now, make an arbitrary choice.
Connect the 2-socket build platform temperature sensor to the center two pins of the 1×6 pin header block immediately above the Z-axis stepper motor connector on the center-right edge of the board, as pictured.
Z- and X-axis connections
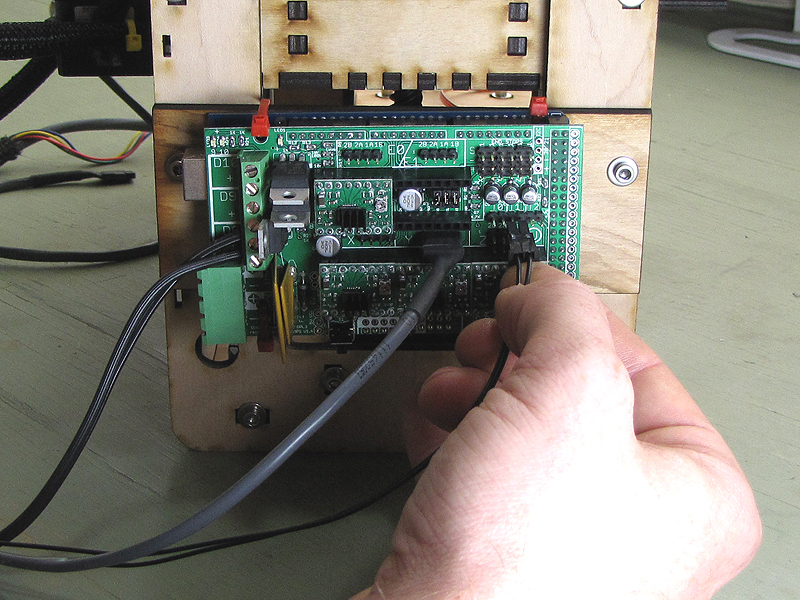
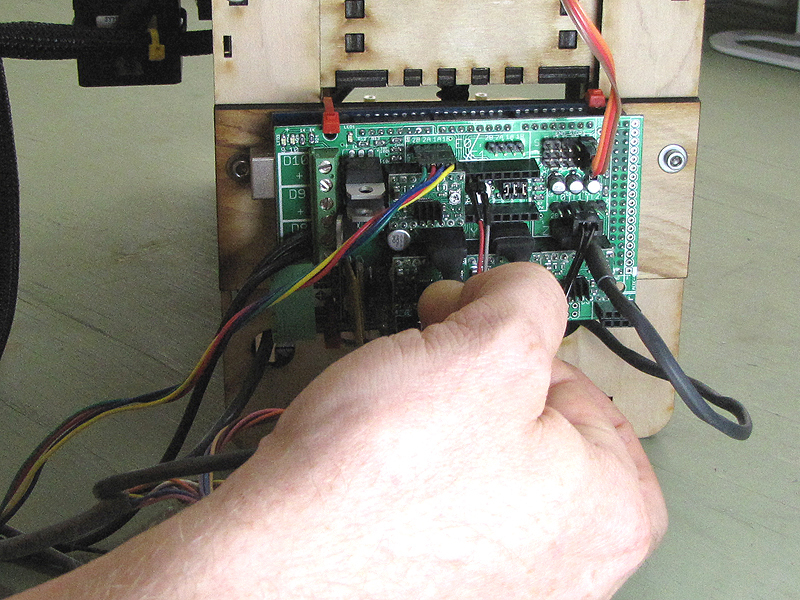
Locate the 1×3 socket connector from the Z-axis upper limit switch, and install it in the 3×6 pin header block in the second position from the right, as shown.
Find the 1×4 socket Z-axis stepper motor cable connector, and plug it into the 1×4 pin header block immediately to the right of the Y-axis stepper connection. This connector can be reversed later, if it turns out the motor is turning the wrong way.
Find the 1×4 socket X-axis stepper motor cable connector, and plug it into the 1×4 pin header immediately to the left of the Y-axis stepper connection. Again, the orientation of the connector is arbitrary.
Extruder connections
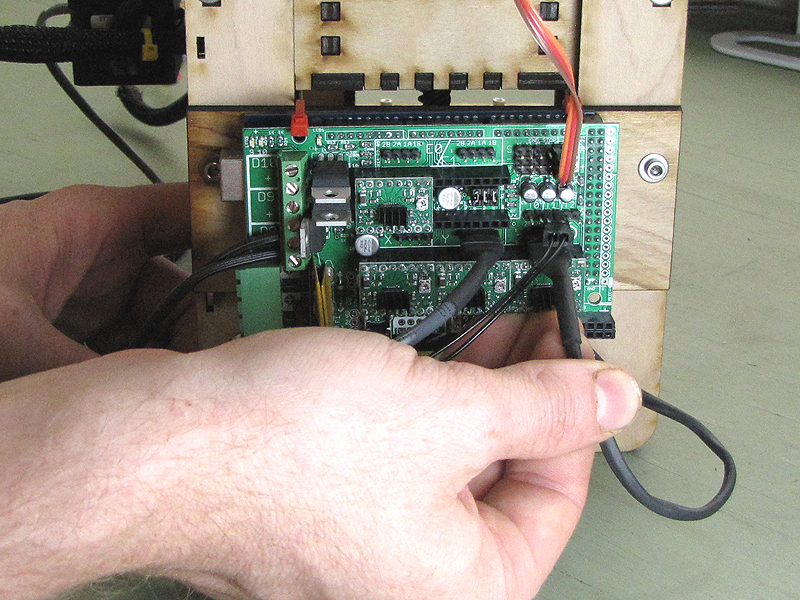
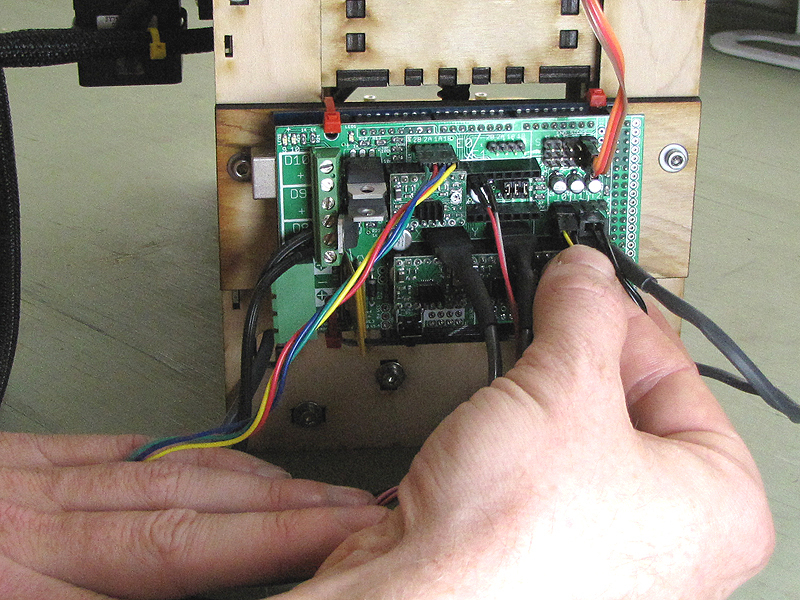
Find the 1×4 socket connector from the extruder motor in the extruder wiring harness and connect it to the 1×4 pin header about center on the top edge of the PCB, as shown. As with the other three motors, this connection is simply flipped over later if the extruder turns out to be wired backwards.
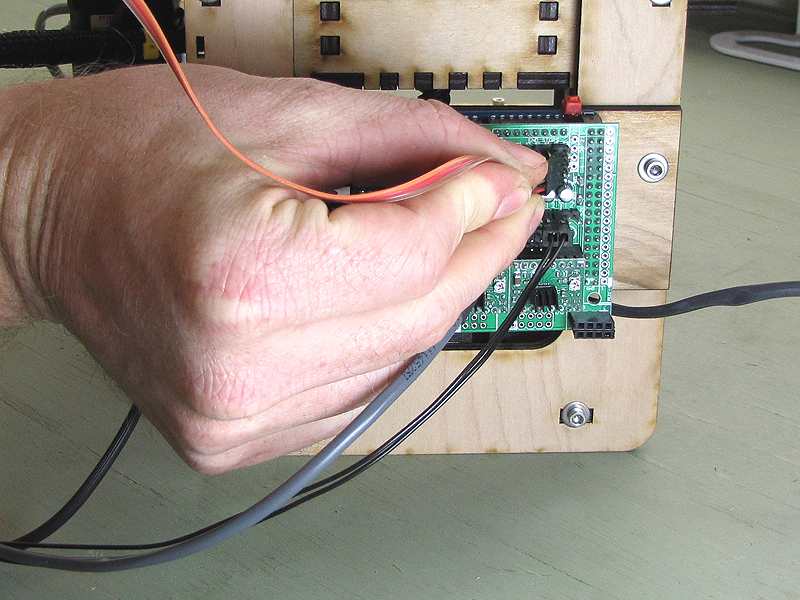
Find the 2-pin connector from the hot end fan in the extruder wiring harness and connect it to the two leftmost positions in the upper 1×6 socket header. The red wire goes to the left, as shown.
Find the 2-socket connector from the temperature sensor in the extruder wiring harness and connect it to the two leftmost positions in the 1×6 pin header, center right edge, immediately to the left of the build platform temperature sensor connector.
Power connections
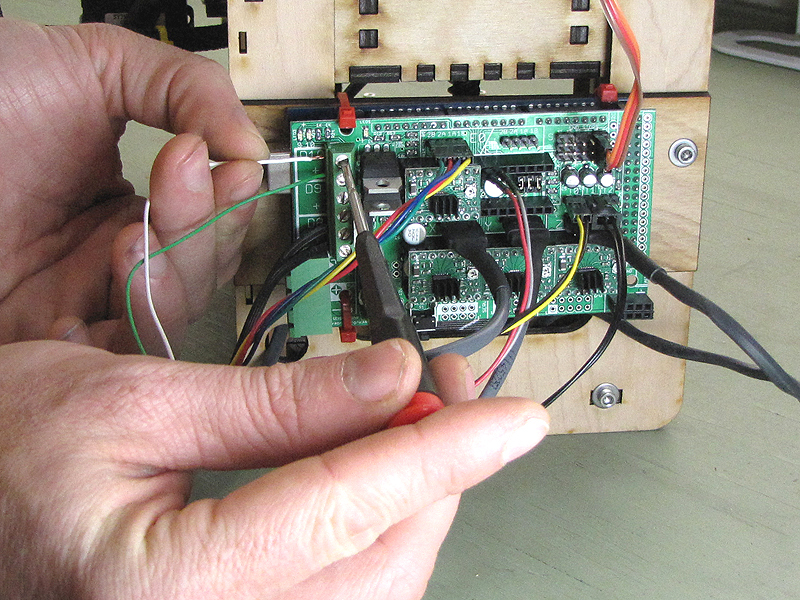
Loosen the screw in each of two terminals D10 in the terminal block in the upper left corner, as pictured, of the RAMPS PCB. Insert one of the two extruder heater power leads into each of these terminals. One of these wires is green, and one is white, but the heater is not polarized, so it does not matter which of the two wires goes into which of the two terminals D10. Tighten the screws back down to secure the leads.
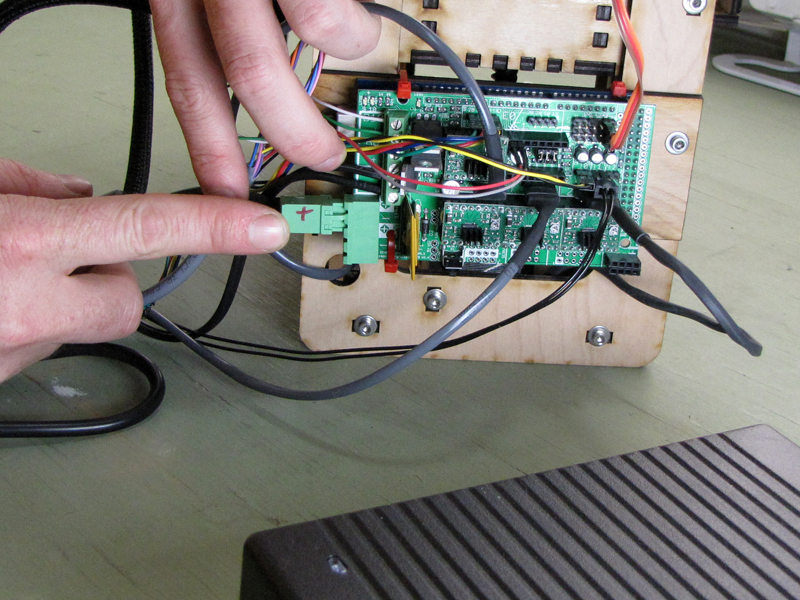
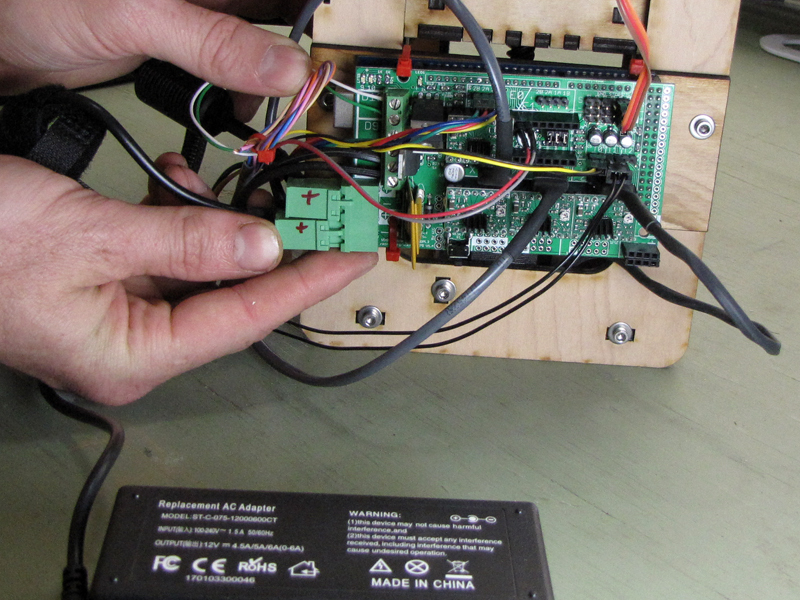
Connect the 20V power supply in the top two positions of the 4-position Molex terminal block in the lower left corner of the PCB, as shown. The connector on the power supply cord should be clearly marked on one side with a large + symbol. Be sure to orient the connector with the + in the upper position, as shown. Reversing this connection can destroy the electronics and may present a fire hazard.
Connect the 12V power supply in the bottom two positions of the 4-position Molex terminal block in the lower left corner of the PCB, as shown. The connector on the power supply cord should be clearly marked on one side with a large + symbol. Be sure to orient the connector with the + in the upper position, as shown. Reversing this connection can destroy the electronics and may present a fire hazard.
Conclusion
When you're done making the connections to the PCB, you may have quite a messy bowl of spaghetti hanging off the side of your printer. Make sure that the wires are clear of the moving parts of the robot, but resist the temptation to start tidying up with zip ties and cable clips until you've got the printer calibrated and running more-or-less as you like it. Adjustments during setup may require partial dismantling of the printer, including removing the PCB and side panel, and you'll want to save any straightening up until you're fairly confident you won't have to undo it for awhile.
This concludes formal assembly of the Mosaic. There's still a lot to do to get it up and running, and the details of how to do that will vary with the details of the computer and software you use. When I get mine printing, I will post a description of the process and link it from this guide. In the meantime, Marcus Dobeck and Rick Pollack have prepared a Getting Started PDF that should get you well on your way.
I am descended from 5,000 generations of tool-using primates. Also, I went to college and stuff. I am a long-time contributor to MAKE magazine and makezine.com. My work has also appeared in ReadyMade, c't – Magazin für Computertechnik, and The Wall Street Journal.