

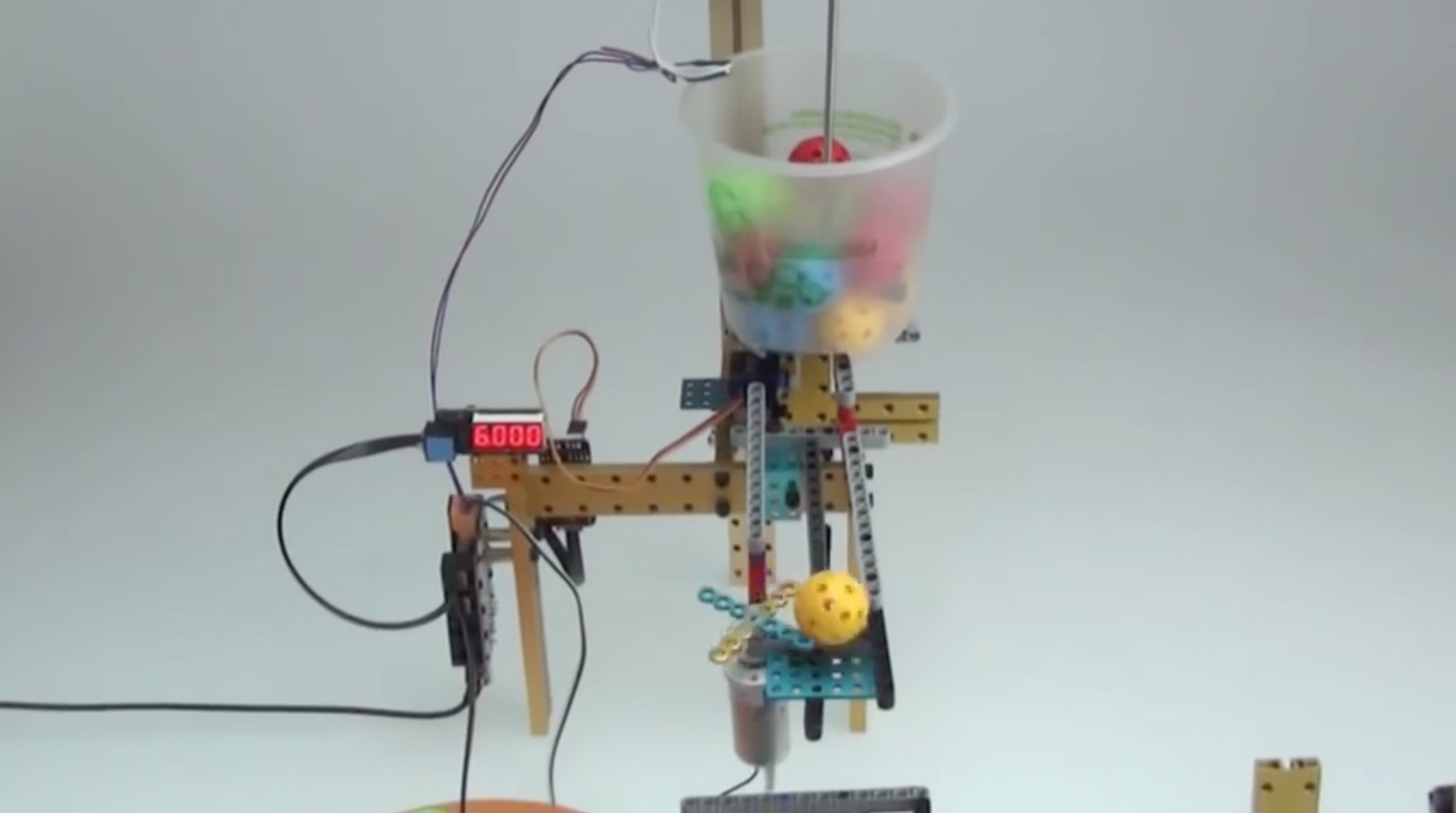
The video above is a demo of the robot. After watching example videos showing a GBC (Great Ball Contraption), we really wanted to build one ourselves. Finally, we decided to build a robot which could count the number of the balls. It could be refitted to other robots which could count the number of screws or other tiny parts.
How it works
Since we don’t have an infrared sensor which could detect the object, we decided to build a smart structure which could give a response when the ball passes. As you can see in the video, we use a lever. The left side is a basket. When a ball is falling down, the limit switch is touched. It transmits a signal to a numerical display which shows the number of the balls. The electronic parts are based on Arduino.
![]()
This week marks the official launch of Make: Volume 39 — Robotics, which drops on newsstands the 27th. Be sure to grab a copy at a retailer near you, or subscribe online right now and never miss another issue.
We are celebrating with five days of robot-related articles, pictures, videos, reviews and projects. Tune into this space for Robot Week!




















